csprimer-computersystem-concept5
csprimer-operatingsystem-concept1
-
(143) How a Single Bit Inside Your Processor Shields Your Operating System’s Integrity - YouTube excellent animated video teaching low level
assembly
-
Ray Toal → ray has tons of useful resources Clean Code
-
x64 NASM Cheat Sheet → useful Chromium OS Docs - Linux System Call Table → systemcall to register cheatsheat Assembly - System Calls → tutorialspoint
x86 and amd64 instruction reference → damn
project : hackclub/some-assembly-required: 📖 An approachable introduction to Assembly. some-assembly-required/guide/resources.md at main · hackclub/some-assembly-required
-
debugger gef and pwndbg unix-gdb
x64 NASM cheat sheet
Registers
| 64 bit | 32 bit | 16 bit | 8 bit | |
|---|---|---|---|---|
| A (accumulator) | RAX | EAX | AX | AL |
| B (base, addressing) | RBX | EBX | BX | BL |
| C (counter, iterations) | RCX | ECX | CX | CL |
| D (data) | RDX | EDX | DX | DL |
RDI | EDI | DI | DIL | |
RSI | ESI | SI | SIL | |
| Numbered (n=8..15) | Rn | RnD | RnW | RnB |
| Stack pointer | RSP | ESP | SP | SPL |
| Frame pointer | RBP | EBP | BP | BPL |
; ----------------------------------------------------------------------------------------
; Writes "Hello, World" to the console using only system calls. Runs on 64-bit Linux only.
; To assemble and run:
;
; nasm -felf64 hello_linux.asm && ld hello_linux.o && ./a.out
;
; Derived from the NASM tutorial at https://cs.lmu.edu/~ray/notes/nasmtutorial/
; ----------------------------------------------------------------------------------------
global _start
section .text
_start: mov rax, 1 ; system call for write
mov rdi, 1 ; file handle 1 is stdout
mov rsi, message ; address of string to output
mov rdx, 13 ; number of bytes
syscall ; invoke operating system to do the write
mov rax, 60 ; system call for exit
xor rdi, rdi ; exit code 0
syscall ; invoke operating system to exit
section .data
message: db "Hello, World", 10 ; note the newline at the end
objdump -d file.o → show the code exactly , better than hexdump , as -d is for asm
48 31 ff xor %rdi,%rdi`` use less bytes than move`
more efficient?
output are from right to left as arch form intel
att Display instruction in AT&T syntax intel Display instruction in Intel syntax
objdump -Mintel,x86-64 -d hello_linux.o → turn back intel to left to right
ld → link file for becoming excutable
language
Disassembly of section .text:
0000000000000000 <_start>:
0: b8 01 00 00 00 mov eax,0x1
5: bf 01 00 00 00 mov edi,0x1
a: 48 be 00 00 00 00 00 movabs rsi,0x0
11: 00 00 00
14: ba 0d 00 00 00 mov edx,0xd
19: 0f 05 syscall
1b: b8 3c 00 00 00 mov eax,0x3c
20: 48 31 ff xor rdi,rdi
23: 0f 05 syscall
- b8 is the r0 register , there is 7 register out there , b8 to bf all the r0 to r7 (32 bits eax to edi)
use file x.file to check what type of file it is
lldb , breakpoint , → run → register eax → step → or reg read (show all register)
you can config register in different format
Whats the difference between Intel and ATT assembly syntax
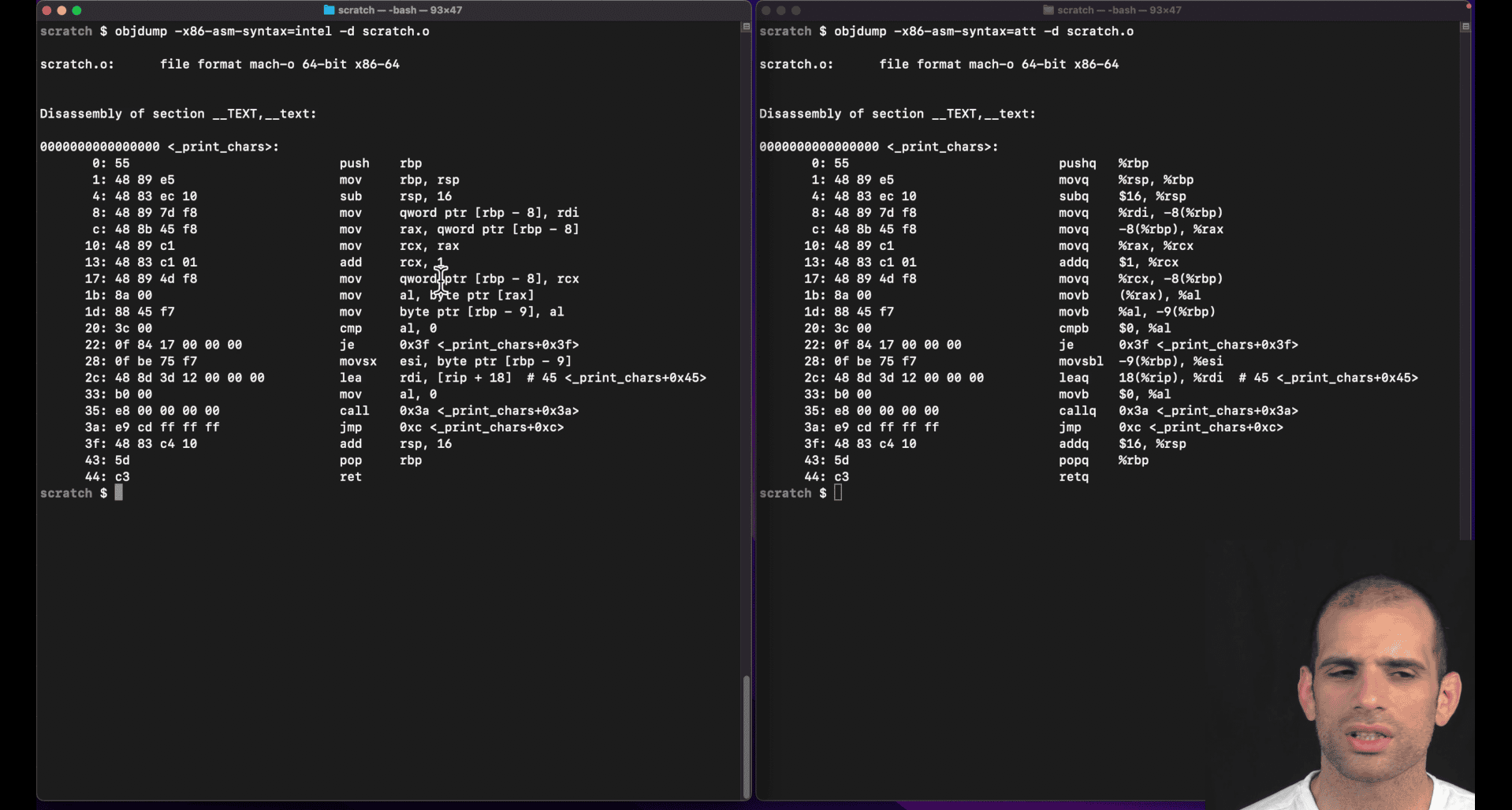
left intel, right : att(unix)
att show more info, from right to left though
att: q→quartword
Intel vs AT&T Syntax Differences
AT&T syntax (used by GNU assembler as, gcc, objdump):
- Operand order:
source, destination(opposite of Intel) - Register prefixes:
%before registers (%rax,%rdi) - Immediate prefixes:
$before constants ($42,$0x100) - Memory addressing:
(%rax)for dereference,4(%rax)for offset - Size suffixes:
b(byte),w(word),l(long/dword),q(quad/qword)
Intel syntax (used by NASM, MASM, Intel docs):
- Operand order:
destination, source(more intuitive) - No prefixes:
rax,rdi(no%) - No immediate prefix:
42,0x100(no$) - Memory addressing:
[rax],[rax+4] - No size suffixes: size inferred from operands
AT&T Size Suffixes Explained
| Suffix | Size | Example | Intel Equivalent |
|---|---|---|---|
b | 8-bit (byte) | movb %al, %bl | mov bl, al |
w | 16-bit (word) | movw %ax, %bx | mov bx, ax |
l | 32-bit (long) | movl %eax, %ebx | mov ebx, eax |
q | 64-bit (quad) | movq %rax, %rbx | mov rbx, rax |
Examples
AT&T:
movq $42, %rax # Move immediate 42 to rax
movl %eax, (%rbx) # Move eax to memory at rbx
addq $8, %rsp # Add 8 to rsp
subq %rdx, %rcx # Subtract rdx from rcxIntel:
mov rax, 42 # Move immediate 42 to rax
mov [rbx], eax # Move eax to memory at rbx
add rsp, 8 # Add 8 to rsp
sub rcx, rdx # Subtract rdx from rcxWhy AT&T Uses Suffixes
- Explicit sizing: Makes instruction size clear in source code
- Historical: AT&T syntax predates modern assemblers that infer sizes
- Consistency: Same suffix system across all instruction types
Tools and Syntax
- GNU tools (
gcc,objdump,gdb): Default to AT&T - NASM: Intel syntax
- GAS: Can use
.intel_syntaxdirective for Intel syntax - LLDB/GDB: Can switch between syntaxes with
set disassembly-flavor intel
Most Linux/Unix development uses AT&T syntax, while Windows development typically uses Intel syntax.
What are the general purpose registers in x8664
ax, bx , cx ,dx,di,si (legacy register) ah → half (less common) al → last (less common) di , si → , destination, source bp, sp → base pointer, stack pointer
bp→ top of the last stack frame (compiler don’t always update this value though)
ip → instruction pointer (store currently executing instruction)
flags → result of previous executing instruction, (overflow , last comparison situation etc)
inter doing ‘extend’ version register
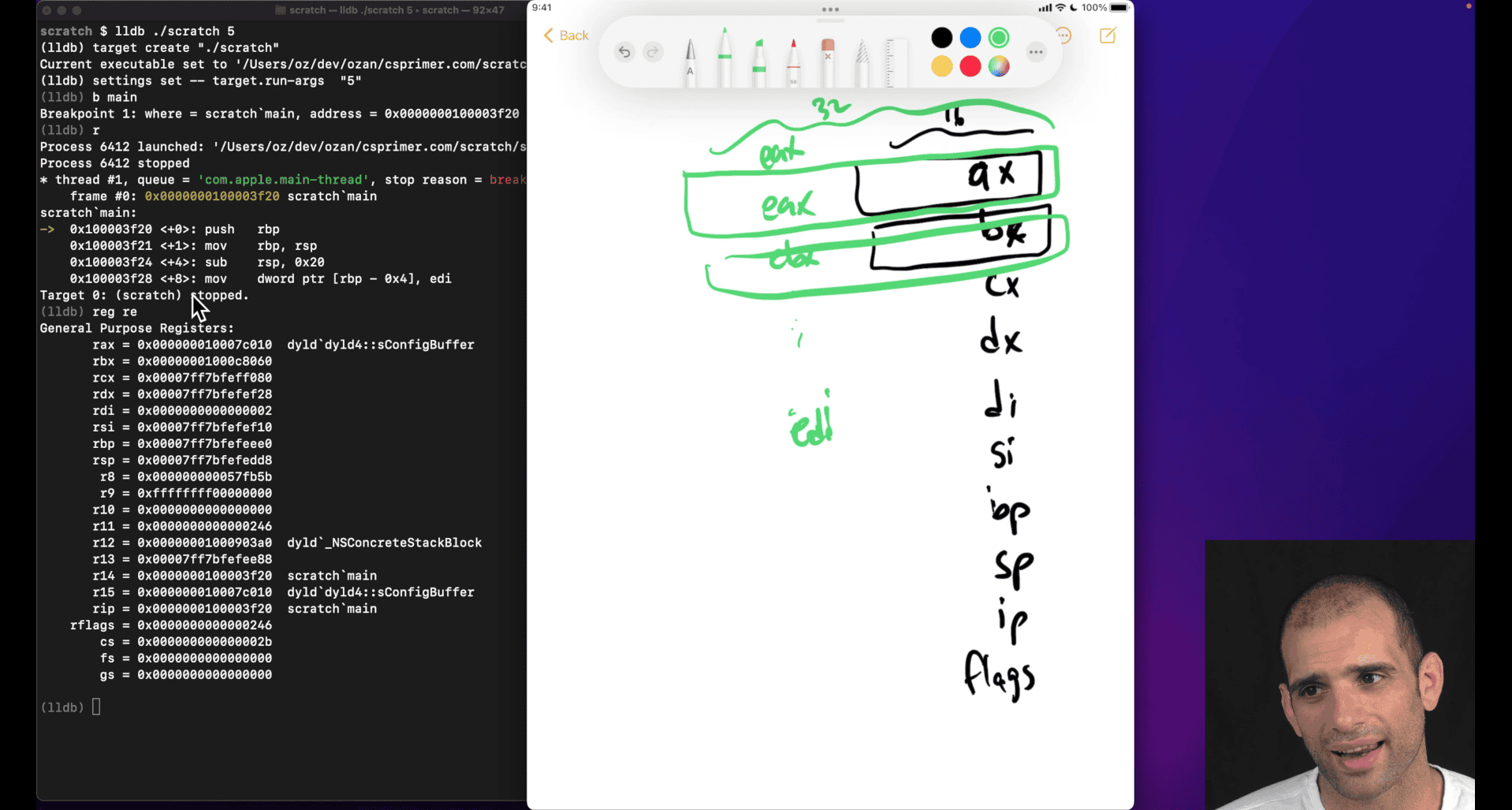
smaller register will overflow (like adding ax to bx) even in larger physical register , just like making smaller btyes version why still here:
- smaller size
- compatible
rax → more extend from 32bits to 64 bits from eax
some case that doing 32bits register +-+*/ in 64 bits, higher bits will zero out, but 16 bits won’t WTF
cpu not able to do some out of order executions because it don’t know whether the extra bits need or not, zero out?
-
reg read --allin lldb -
calling convention → e.g unix , need to put return into rax
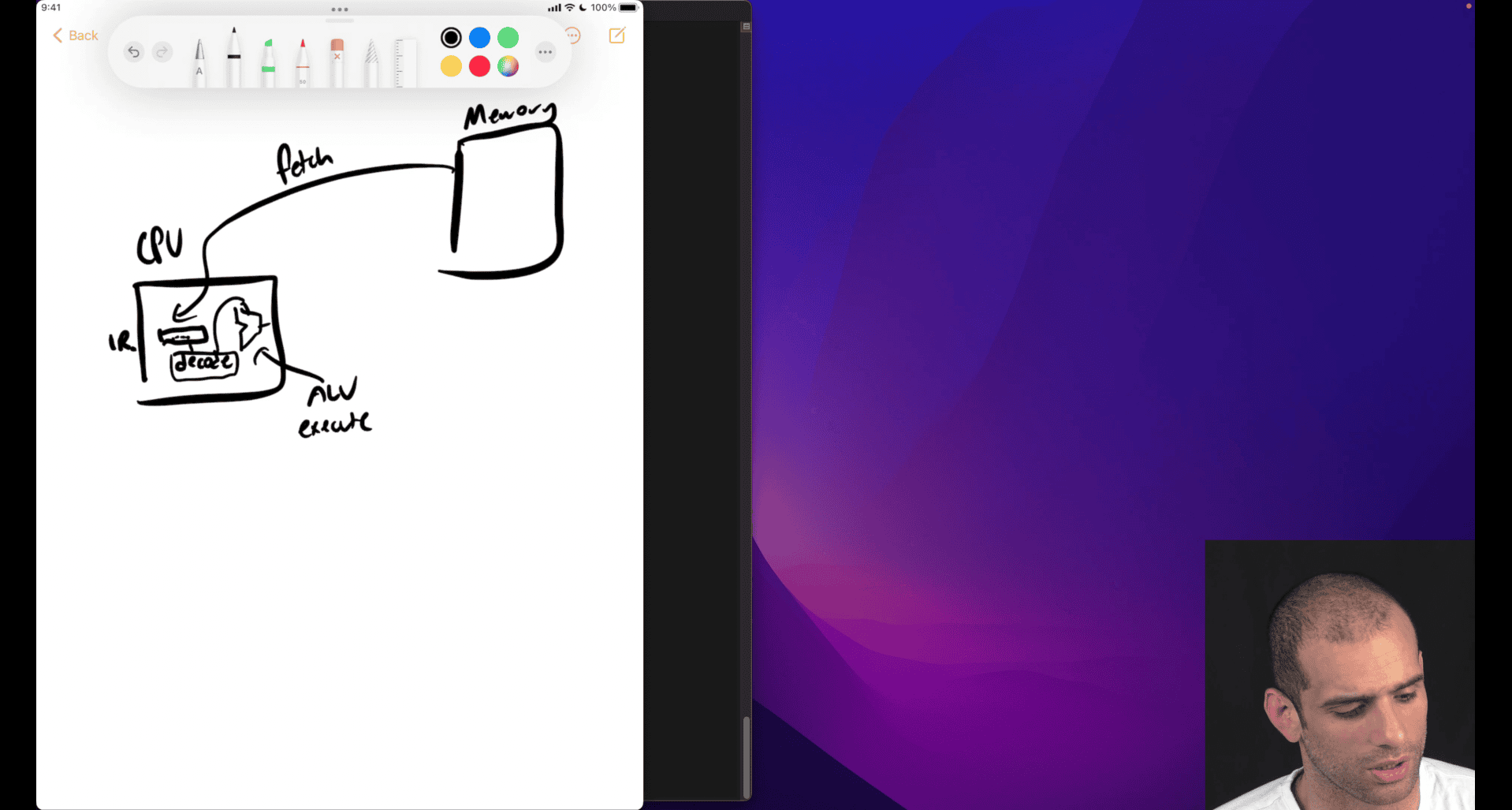
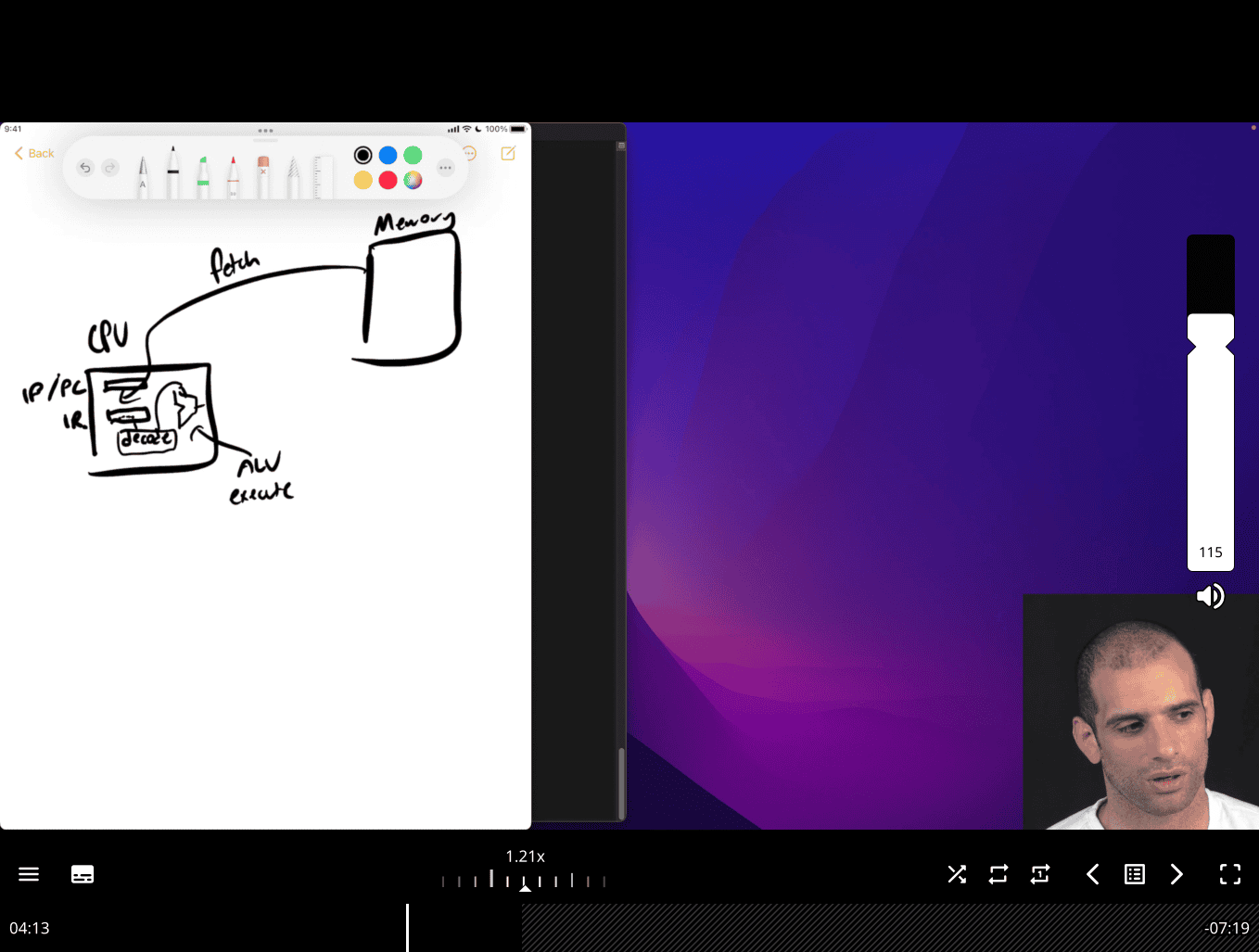
What is the fetch‑decode‑execute cycle?
Fetch-Decode-Execute Cycle
The Fetch-Decode-Execute cycle is the fundamental process that CPUs use to execute machine instructions. It’s a continuous loop that processes instructions one at a time.
The Three Stages
1. Fetch (IF - Instruction Fetch)
- CPU reads the next instruction from memory
- Uses the Instruction Pointer (
%rip) to know where to fetch from - Loads instruction into the Instruction Register (IR)
- Increments
%ripto point to next instruction
2. Decode (ID - Instruction Decode)
- CPU analyzes the fetched instruction
- Determines:
- What operation to perform (opcode)
- Which registers to use (operands)
- What addressing mode to use
- How many bytes the instruction occupies
- Sets up control signals for execution
3. Execute (EX - Execute)
- CPU performs the actual operation
- Examples:
- Arithmetic/logic operations
- Memory read/write
- Register transfers
- Control flow changes (jumps, calls)
Visual Representation
┌─────────┐ ┌─────────┐ ┌─────────┐
│ FETCH │───▶│ DECODE │───▶│ EXECUTE │
│ │ │ │ │ │
│ Read │ │ Analyze │ │ Perform │
│ from │ │ opcode │ │ operation│
│ %rip │ │ & ops │ │ │
└─────────┘ └─────────┘ └─────────┘
▲ │
└──────────────────────────────┘
Detailed Example
Let’s trace through: mov %rax, %rbx
Fetch Stage:
1. CPU reads instruction at address in %rip
2. Loads "mov %rax, %rbx" into Instruction Register
3. Increments %rip to next instruction
Decode Stage:
1. CPU recognizes "mov" opcode
2. Identifies source: %rax register
3. Identifies destination: %rbx register
4. Determines this is a register-to-register move
5. Sets up internal control signals
Execute Stage:
1. CPU reads value from %rax
2. Writes that value to %rbx
3. Instruction complete, ready for next cycle
Modern CPU Enhancements
Pipelining
Modern CPUs overlap these stages:
Cycle 1: [FETCH] [ ] [ ]
Cycle 2: [DECODE] [FETCH] [ ]
Cycle 3: [EXECUTE] [DECODE] [FETCH]
Cycle 4: [ ] [EXECUTE] [DECODE]
Cycle 5: [ ] [ ] [EXECUTE]
Superscalar Execution
- Multiple execution units work in parallel
- Can execute multiple instructions simultaneously
- Still follows fetch-decode-execute, but with parallelism
Out-of-Order Execution
- Instructions can execute out of program order
- CPU reorders instructions for better performance
- Maintains program correctness through dependency tracking
Special Cases
Control Flow Instructions
jmp label # Changes %rip directly
call func # Saves return address, then jumps
ret # Restores %rip from stackMemory Access
mov (%rax), %rbx # Fetch: instruction
# Decode: memory read operation
# Execute: read from memory, write to %rbxPerformance Implications
Fetch Bottlenecks:
- Cache misses slow down fetch
- Branch mispredictions waste fetch cycles
Decode Bottlenecks:
- Complex instruction formats take longer to decode
- Variable-length instructions (x86) complicate decoding
Execute Bottlenecks:
- Memory access latency
- Complex arithmetic operations
- Resource conflicts
In Assembly Programming
Understanding the cycle helps with:
Optimization:
## Good: Simple instructions decode faster
mov %rax, %rbx # Fast decode/execute
## Slower: Complex addressing modes
mov 8(%rax,%rcx,4), %rbx # More complex decodeDebugging:
%ripshows where CPU is fetching next- Understanding why certain instructions are slower
- Recognizing pipeline stalls
Quick Summary
- Fetch: Read instruction from
%rip - Decode: Figure out what to do
- Execute: Do the operation
- Repeat: Move to next instruction
This cycle runs billions of times per second in modern CPUs, with sophisticated optimizations to make it as fast as possible!
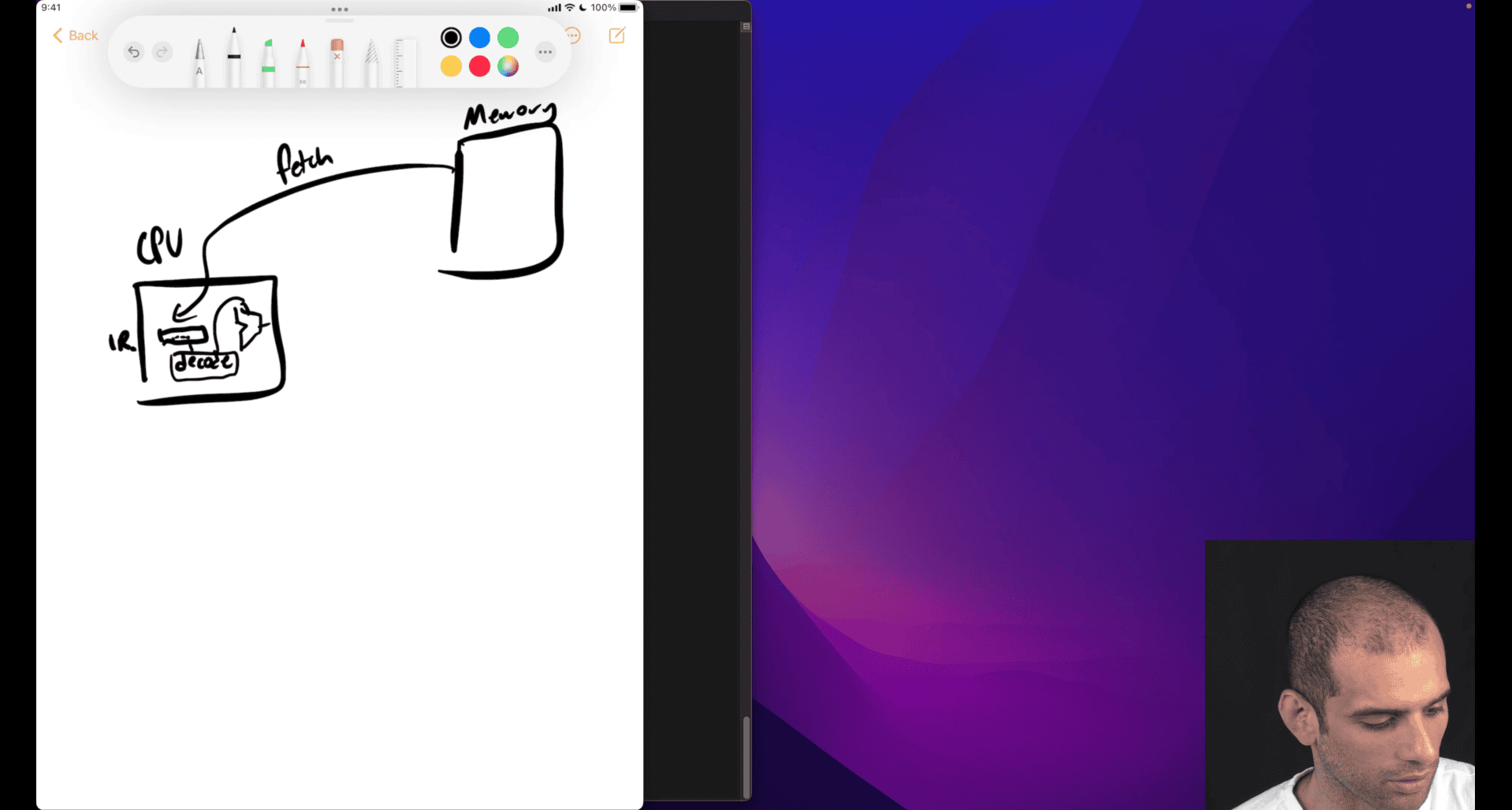
extra function like jump , function call , → advance movement then need to analysis what is the next move gonna do
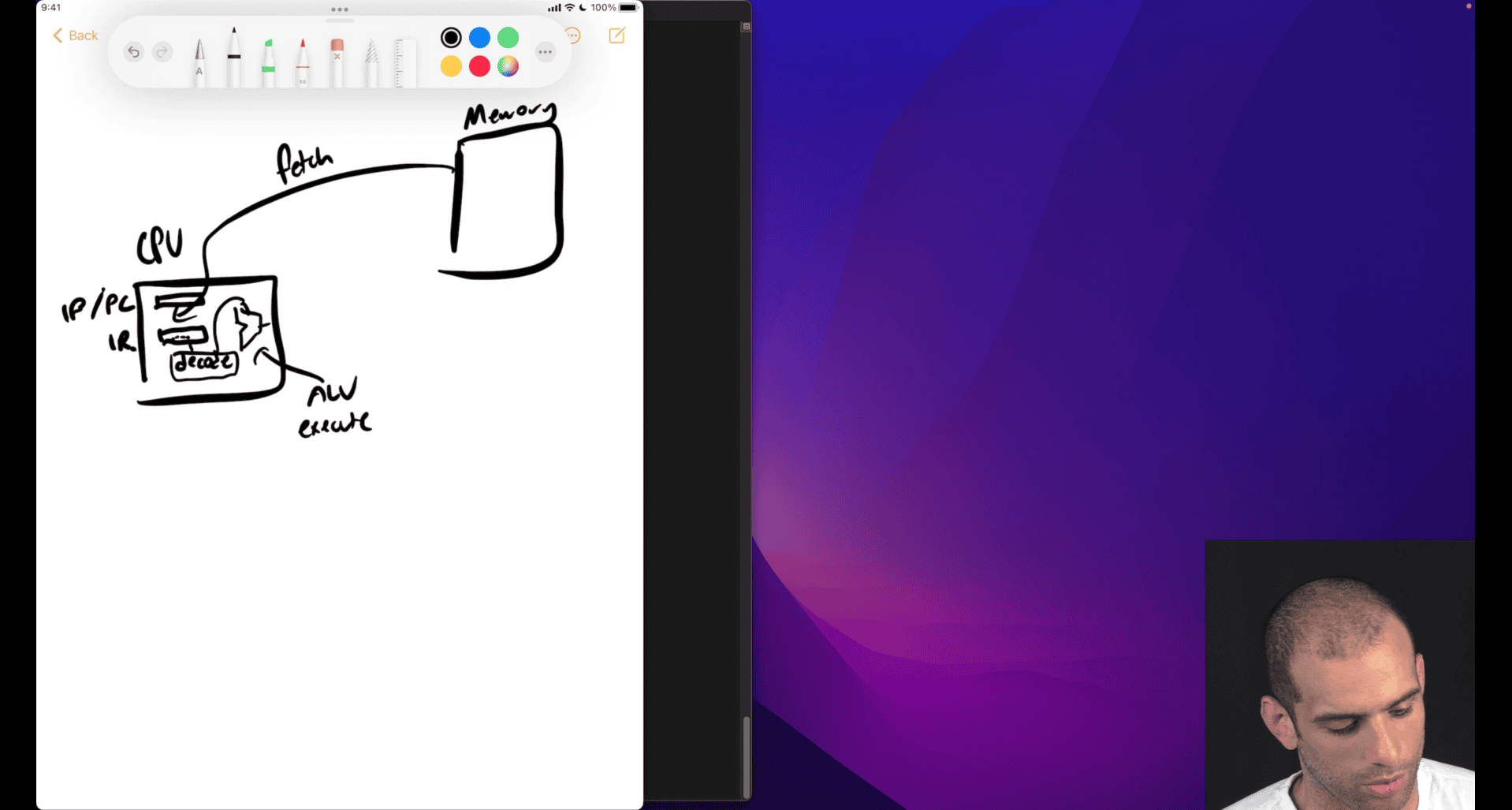
store the next move in ip/pc → , instruction pointer ~= Pointer counter
- store the address , next thing to fetch , encode and execute
iterating → nature of the machine, e.g. cpu clocks
#include <stdio.h>
#include <stdlib.h>
int square(int n) { return n * n; }
int main(int argc, char **argv) {
int n = atoi(argv[1]);
printf("%d x %d = %d\n", n, n, square(n));
}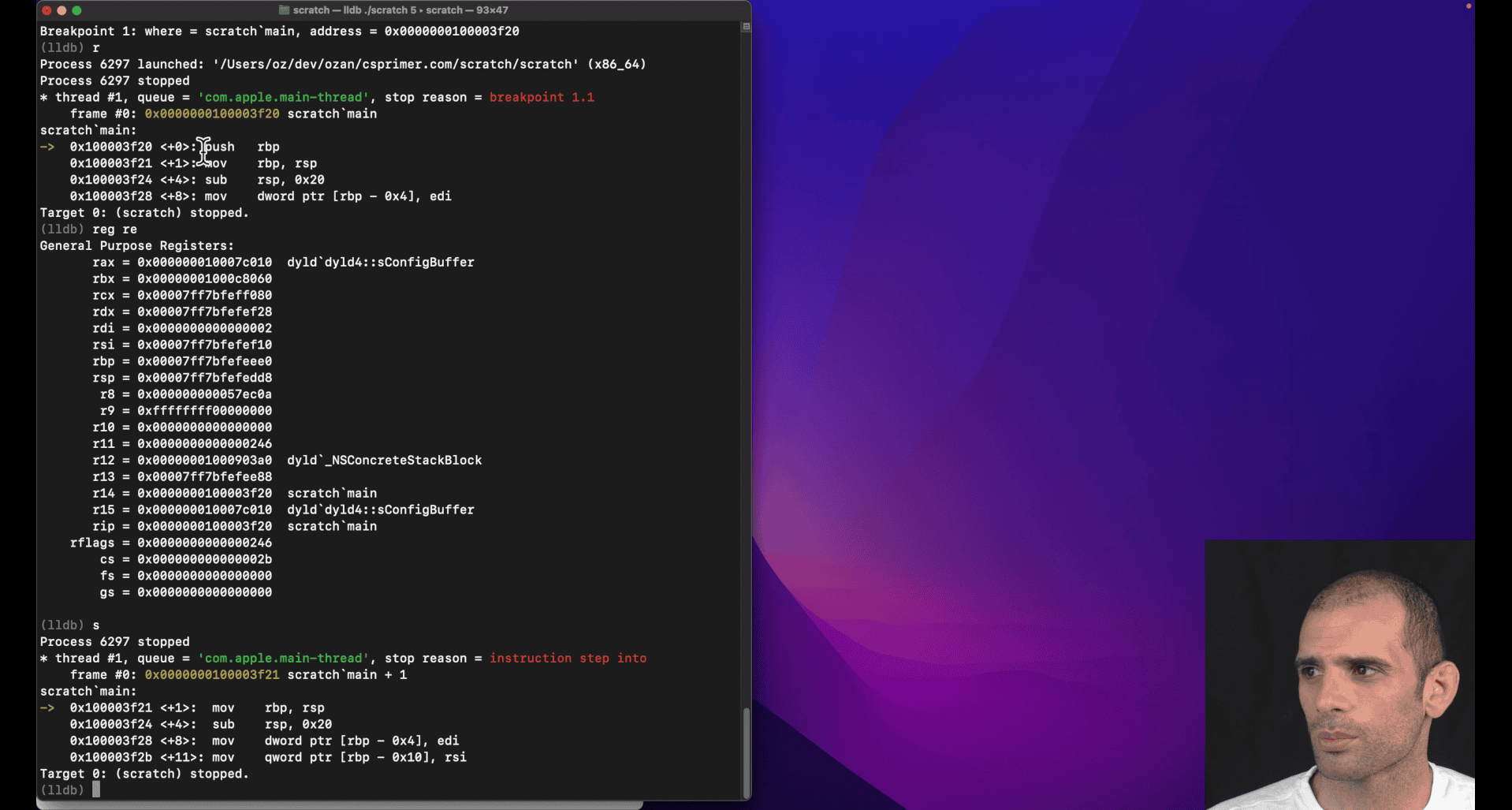
0x555555555158 <+0>: pushq %rbp 0x555555555159 <+1>:
it only take 1 byte to pushq rbp in x86
s + reg re rip
rip = 0x0000555555555159 scratch main + 1
0x555555555159 <+1>: movq %rsp, %rbp
0x55555555515c <+4>: subq $0x20, %rsp
movq → three bytes from +1 to +4
imagine movq is fetch 1 step
rip = 0x000055555555515c scratch`main + 4
rbp = 0x00007fffffffcac0
rsp = 0x00007fffffffcac0
0x55555555515c <+4>: subq $0x20, %rsp
rsp = 0x00007fffffffcaa0
from ac0 to aa0
rip = 0x0000555555555160 scratch`main + 8 (indicate subq = 4 bytes)
The System V AMD64 calling convention
What is a Calling Convention?
A calling convention is a standardized set of rules that defines:
- How function arguments are passed
- Which registers are preserved across function calls
- How return values are handled
- How the stack is managed
- Who (caller or callee) is responsible for cleanup
Why needed? Without conventions, different functions couldn’t call each other reliably. It’s like agreeing on a common “language” for function communication.
System V AMD64 Calling Convention (Unix Family)
This is the standard calling convention for 64-bit Linux/Unix systems (also used by macOS).
- window use slightly different convention → wiki x86 calling conventions
Argument Passing
| Position | Register | Purpose |
|---|---|---|
| 1st | %rdi | First integer/pointer argument |
| 2nd | %rsi | Second integer/pointer argument |
| 3rd | %rdx | Third integer/pointer argument |
| 4th | %rcx | Fourth integer/pointer argument |
| 5th | %r8 | Fifth integer/pointer argument |
| 6th | %r9 | Sixth integer/pointer argument |
| 7th+ | Stack | Additional arguments pushed right-to-left |
Return Values
| Type | Register | Description |
|---|---|---|
| Integer/Pointer | %rax | Return value |
| Large structs | %rax | Pointer to return value |
| Floating point | %xmm0 | Return value |
Register Preservation
| Category | Registers | Responsibility |
|---|---|---|
| Caller-saved | %rax, %rcx, %rdx, %rsi, %rdi, %r8, %r9, %r10, %r11 | Caller must save if needed |
| Callee-saved | %rbx, %rbp, %r12, %r13, %r14, %r15 | Callee must preserve |
- this is kind of important
- function caller , function callee
┌─────────────────┐ │ callee_function │ ← Currently executing (CALLEE) ├─────────────────┤ │ caller_function │ ← Waiting for callee to return (CALLER) ├─────────────────┤ │ main │ ← Waiting for caller to return
Examples
C Function Call:
int add(int a, int b, int c, int d, int e, int f, int g) {
return a + b + c + d + e + f + g;
}Assembly Implementation:
## Arguments passed in:
## %rdi = a, %rsi = b, %rdx = c, %rcx = d
## %r8 = e, %r9 = f, stack = g
add:
# Save callee-saved registers if needed
push %rbx
push %rbp
# Get 7th argument from stack
mov 24(%rsp), %rax # Skip saved %rbp, %rbx, return addr
# Add all arguments
add %rsi, %rdi # a + b
add %rdx, %rdi # + c
add %rcx, %rdi # + d
add %r8, %rdi # + e
add %r9, %rdi # + f
add %rax, %rdi # + g
# Return value in %rax
mov %rdi, %rax
# Restore callee-saved registers
pop %rbp
pop %rbx
retCalling the Function:
## Prepare arguments
mov $1, %rdi # 1st arg
mov $2, %rsi # 2nd arg
mov $3, %rdx # 3rd arg
mov $4, %rcx # 4th arg
mov $5, %r8 # 5th arg
mov $6, %r9 # 6th arg
push $7 # 7th arg on stack
call add # Call function
add $8, %rsp # Clean up stack (remove pushed arg)
## Result in %raxStack Management
Stack Layout During Function Call:
High Memory
↓
┌─────────────┐
│ Arg 7 │ ← %rsp + 24 (after call)
├─────────────┤
│ Return Addr │ ← %rsp + 16 (pushed by call)
├─────────────┤
│ Saved %rbp │ ← %rsp + 8
├─────────────┤
│ Saved %rbx │ ← %rsp (current)
└─────────────┘
Low Memory
Red Zone
- 128 bytes below
%rspare reserved - Functions can use this space without adjusting
%rsp - Useful for leaf functions (functions that don’t call others)
Floating Point Arguments
| Position | Register | Purpose |
|---|---|---|
| 1st | %xmm0 | First floating point argument |
| 2nd | %xmm1 | Second floating point argument |
| 3rd | %xmm2 | Third floating point argument |
| 4th | %xmm3 | Fourth floating point argument |
| 5th+ | Stack | Additional FP arguments |
Common Patterns
Function Prologue:
my_function:
push %rbp # Save caller's base pointer
mov %rsp, %rbp # Set new base pointer
sub $16, %rsp # Allocate local variables
# Function body...Function Epilogue:
mov %rbp, %rsp # Restore stack pointer
pop %rbp # Restore base pointer
ret # Return to callerSystem Calls (Linux):
mov $1, %rax # sys_write
mov $1, %rdi # file descriptor
mov $message, %rsi # buffer
mov $13, %rdx # length
syscall # Make system callKey Points
- First 6 integer args:
%rdi,%rsi,%rdx,%rcx,%r8,%r9 - Return value:
%rax - Caller-saved: Use freely, but save if needed after call
- Callee-saved: Must preserve if used
- Stack alignment: Keep stack 16-byte aligned
- Red zone: 128 bytes below
%rspare safe to use
This convention ensures that C functions, assembly functions, and system calls can all work together seamlessly!
| Category | Registers | Responsibility |
|---|---|---|
| Caller-saved | %rax, %rcx, %rdx, %rsi, %rdi, %r8, %r9, %r10, %r11 | Caller must save if needed |
| Callee-saved | %rbx, %rbp, %r12, %r13, %r14, %r15 | Callee must preserve |
- this is kind of important
- function caller , function callee
What Your Teacher Means
Your teacher is explaining the callee-saved register preservation rule. When a function (callee) wants to use a callee-saved register, it must:
- Save the original value (push to stack)
- Use the register for its own purposes
- Restore the original value (pop from stack) before returning
This ensures the caller gets back the same register values it had before the call.
The Rule in Action
❌ Wrong Way (Breaks the Convention):
callee_function:
mov $500, %rbx # Using callee-saved register
# ... do work with %rbx ...
ret # Returns without restoring %rbx!Problem: Caller’s %rbx value is lost forever!
✅ Correct Way (Follows Convention):
callee_function:
push %rbx # Save caller's %rbx value
mov $500, %rbx # Use %rbx for our purposes
# ... do work with %rbx ...
pop %rbx # Restore caller's %rbx value
ret # Now caller gets original %rbx backWhen You Need to Do This
Situation 1: You Need Extra Registers
my_function:
# You need more registers than caller-saved ones provide
push %rbx # Save callee-saved register
push %r12 # Save another callee-saved register
mov $100, %rbx # Use %rbx
mov $200, %r12 # Use %r12
# ... complex calculations ...
pop %r12 # Restore in reverse order
pop %rbx
retSituation 2: Long Function with Many Operations
complex_calculation:
push %rbx # Save before using
push %r12
push %r13
# Phase 1: Use %rbx
mov %rdi, %rbx
add $10, %rbx
# Phase 2: Use %r12
mov %rsi, %r12
mul %r12
# Phase 3: Use %r13
mov %rdx, %r13
add %r13, %rax
# Restore all registers
pop %r13
pop %r12
pop %rbx
retSituation 3: Function Calls Other Functions
wrapper_function:
push %rbx # Save before calling other functions
mov $100, %rbx # Use %rbx
call some_function # This might use %rbx too!
add %rbx, %rax # Still need %rbx after call
pop %rbx # Restore before returning
retStack Layout During Preservation
Before push %rbx:
┌─────────────┐
│ Return Addr │ ← %rsp
└─────────────┘
After push %rbx:
┌─────────────┐
│ Saved %rbx │ ← %rsp (new top)
├─────────────┤
│ Return Addr │
└─────────────┘
After push %r12:
┌─────────────┐
│ Saved %r12 │ ← %rsp (new top)
├─────────────┤
│ Saved %rbx │
├─────────────┤
│ Return Addr │
└─────────────┘
Complete Example
# Caller function
caller:
mov $100, %rbx # Caller sets %rbx = 100
mov $200, %r12 # Caller sets %r12 = 200
call callee # Call callee function
# After call, %rbx and %r12 should still be 100 and 200
add %rbx, %rax # Should add 100
ret
# Callee function
callee:
# Save callee-saved registers we want to use
push %rbx # Save caller's %rbx
push %r12 # Save caller's %r12
# Now we can use them freely
mov $500, %rbx # Use %rbx for our work
mov $600, %r12 # Use %r12 for our work
add %rbx, %r12 # %r12 = 500 + 600 = 1100
mov %r12, %rax # Return 1100
# Restore original values before returning
pop %r12 # Restore caller's %r12 = 200
pop %rbx # Restore caller's %rbx = 100
retKey Points
- Push before use: Save callee-saved registers before modifying them
- Pop before return: Restore them before returning
- Reverse order: Pop in reverse order of push (LIFO - Last In, First Out)
- Only if needed: Only save registers you actually use
- Caller-saved are free: You can use caller-saved registers without saving
Memory Trick:
- Push = “Put away for safekeeping”
- Pop = “Get back what you put away”
- Order: Like stacking plates - last plate on top comes off first
This ensures that function calls are “transparent” - the caller doesn’t know or care what registers the callee used internally!
Computer Architecture Terms Explained
Computer Architecture
Computer Architecture is the high-level design of a computer system. It defines:
- What operations the computer can perform
- How programs interact with the hardware
- The interface between software and hardware
- The overall system organization
Think of it as: The “blueprint” or “specification” of how a computer should work.
Instruction Set Architecture (ISA)
ISA is the interface between software and hardware. It defines:
- What instructions the processor can execute
- How instructions are encoded (binary format)
- What registers are available
- How memory is addressed
- What data types are supported
- How exceptions/interrupts are handled
ISA Examples:
- x86-64: Intel/AMD 64-bit processors
- ARM: ARM processors (phones, tablets, some servers)
- RISC-V: Open-source instruction set
- MIPS: Educational/embedded processors
ISA Components:
# x86-64 ISA examples
mov %rax, %rbx # Move instruction
add %rax, %rbx # Add instruction
jmp label # Jump instruction
call function # Call instruction
syscall # System call instructionMicroarchitecture
Microarchitecture is the low-level implementation of an ISA. It defines:
- How instructions are executed internally
- What execution units exist (ALU, FPU, etc.)
- How the pipeline works
- Cache organization
- Branch prediction mechanisms
- Out-of-order execution details
Think of it as: The “engineering details” of how the ISA is actually built.
Relationship Between Them
Software Program
↓
ISA Interface ← What the program sees
↓
Microarchitecture ← How it's actually implemented
↓
Hardware
Analogy: Car Design
- Architecture: “This car should have 4 wheels, an engine, and seats”
- ISA: “The steering wheel turns left/right, gas pedal accelerates, brake pedal stops”
- Microarchitecture: “The engine uses V8 configuration, fuel injection system, automatic transmission with 6 gears”
Examples
Same ISA, Different Microarchitectures:
x86-64 ISA can be implemented by different microarchitectures:
| Processor | Microarchitecture | Features |
|---|---|---|
| Intel Core i7 | Skylake/Coffee Lake | 4-8 cores, AVX-512, branch prediction |
| AMD Ryzen | Zen/Zen2/Zen3 | Different cache design, execution units |
| Intel Atom | Silvermont | Low-power, simpler pipeline |
All run the same x86-64 programs, but with different performance characteristics.
Different ISAs, Similar Goals:
| ISA | Microarchitecture | Use Case |
|---|---|---|
| ARM | Cortex-A78 | Mobile phones |
| x86-64 | Intel Core | Desktop/laptop |
| RISC-V | SiFive U74 | Embedded systems |
Levels of Abstraction
High Level
↓
┌─────────────────┐
│ Application │ ← Your C/Python program
├─────────────────┤
│ Operating │ ← Linux/Windows
│ System │
├─────────────────┤
│ ISA │ ← x86-64 instructions
├─────────────────┤
│ Microarchitecture│ ← How x86-64 is implemented
├─────────────────┤
│ Hardware │ ← Actual transistors
└─────────────────┘
Low Level
Why This Matters for Assembly
ISA Level (What You Write):
mov %rax, %rbx # This is ISA - same on all x86-64
add %rax, %rbx # This is ISA - same on all x86-64Microarchitecture Level (What Happens Inside):
- Intel processor: Might execute this in 1 cycle with 3 execution units
- AMD processor: Might execute this in 1 cycle with 2 execution units
- Different cache behavior: Intel might have better branch prediction
- Different power consumption: AMD might be more power-efficient
Key Takeaways
- ISA: The “contract” between software and hardware
- Microarchitecture: The “implementation” of that contract
- Same ISA: Programs run on different processors
- Different Microarchitecture: Different performance, power, features
- Assembly programming: You work at the ISA level
- Performance optimization: Understanding microarchitecture helps
For Assembly Learning:
- Focus on ISA (instruction set) - this is what you write
- Understand microarchitecture concepts (pipeline, cache) for optimization
- Know that your assembly code will run on any x86-64 processor, but performance varies
Think of ISA as the “language” and microarchitecture as the “accent” - same language, different ways of speaking it!
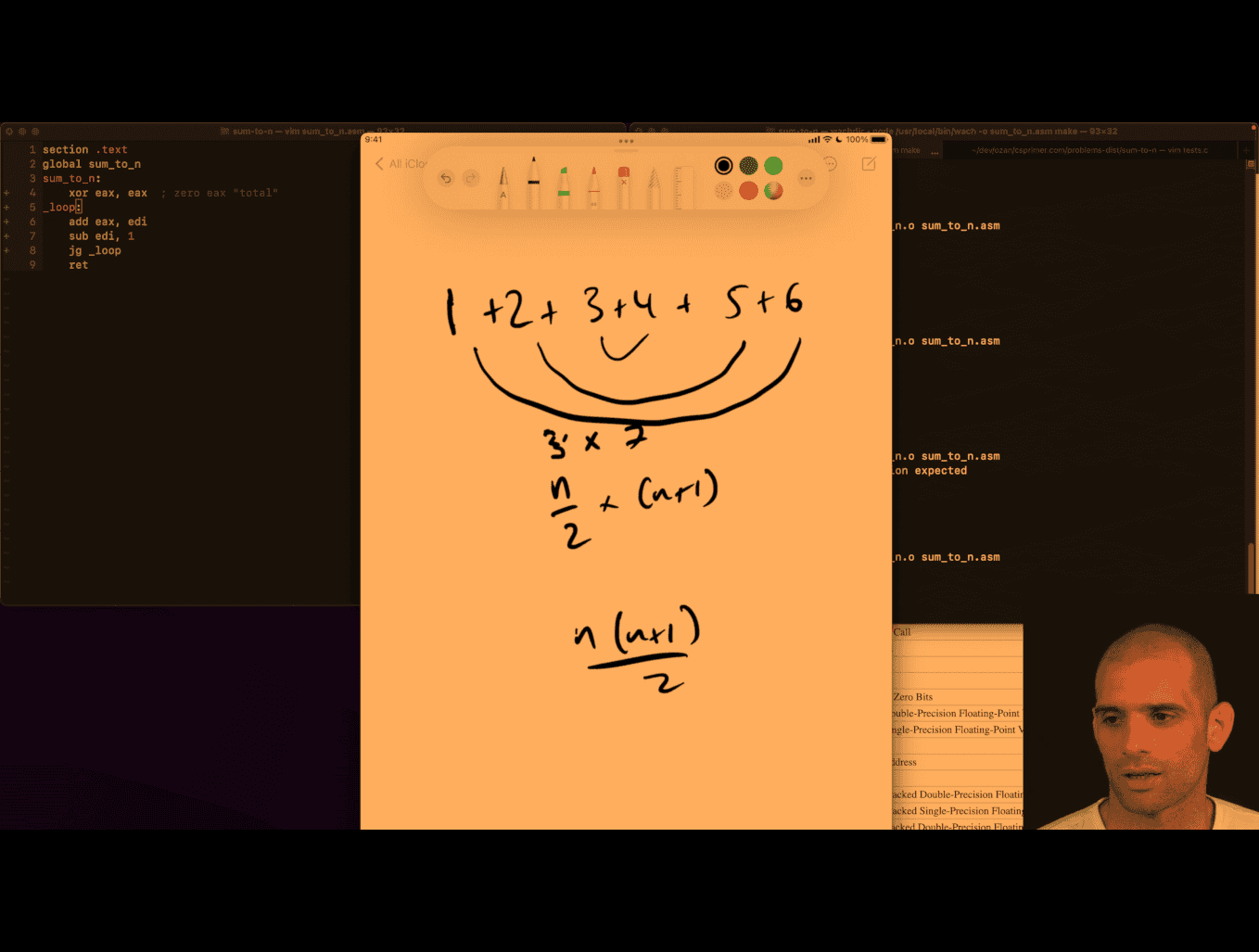
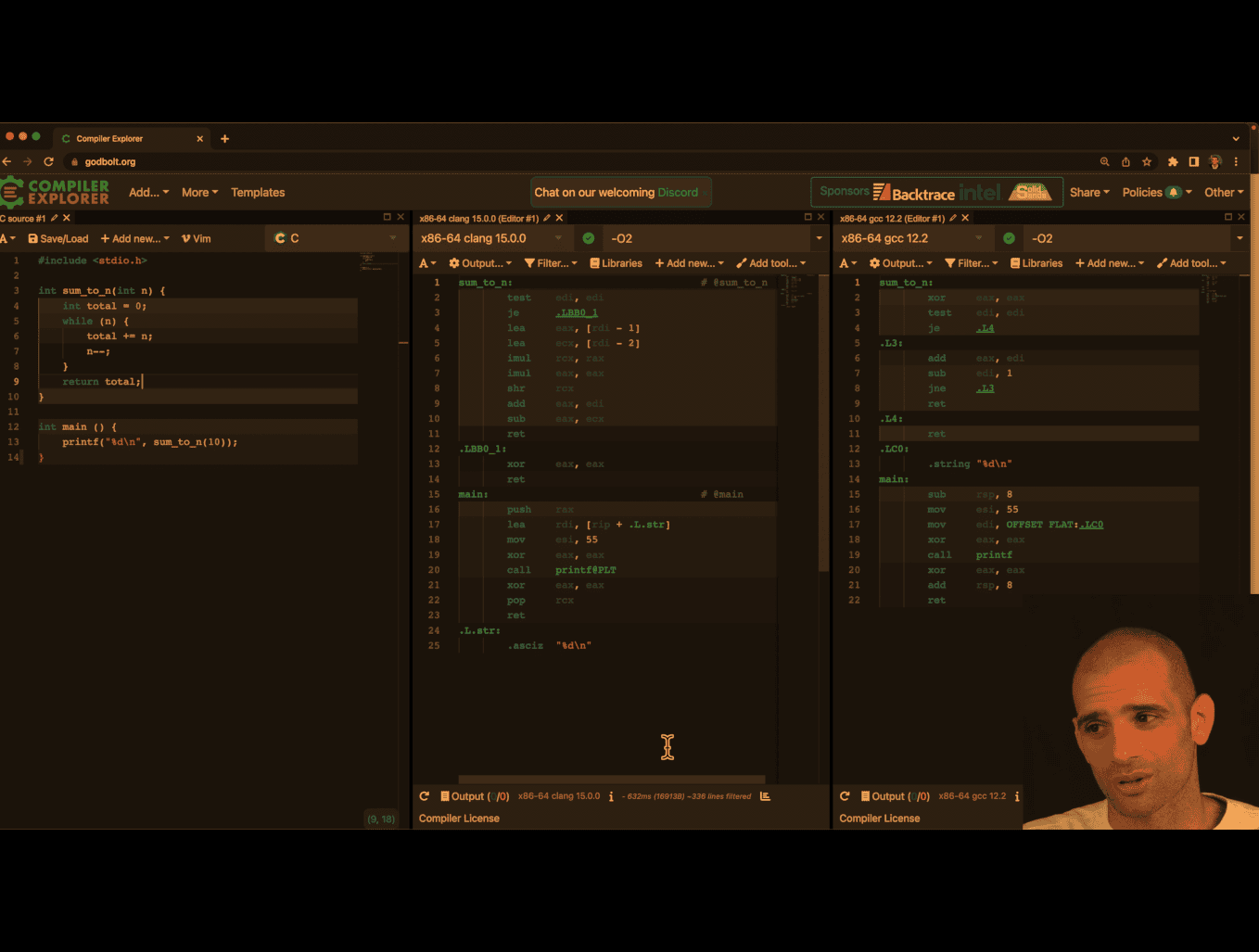
Sum to N
; Slower way:
mov eax, 0 ; Load immediate value 0 into eax
; Faster way:
xor eax, eax ; eax = eax ⊕ eax = 0anguage
XOR Bit-Level Visual Examples
XOR Truth Table
A | B | A ⊕ B
--|---|------
0 | 0 | 0
0 | 1 | 1
1 | 0 | 1
1 | 1 | 0
Key Rule: XOR returns 1 only when the inputs are different
Before XOR:
eax = 10110101
eax = 10110101
--------
XOR = 00000000 ← Always 0 when both operands are identical!
section .text
global sum_to_n
sum_to_n:
; accumlator , zero eax (return vale) "total"
; loop:
; ; add edi into eax, primer trying to use n-1 ,n-2 so that he can use rdi
; eventual will get to 0
; jump to loop if edi eq -1
; mov rax,0 ; if we use other reg, then we gonna copy that in the end, so just directly using rax
; faster to just xor to zero out than move rax,0
xor eax,eax
mov ecx,-1 ;;make this as cmp vaule
_loop:
add eax,edi ; intel way
sub edi,1
cmp edi,ecx
jne _loop
; sub 1 from edi
; comparing edi to -1 (break point?)
; jump to loop if edi != -1
ret
stage 1 this work
Your teacher is explaining a fundamental connection between arithmetic operations and conditional logic in assembly! Let me break down what they mean:
The Key Insight: SUB Modifies Flags for Jumps
Your teacher is pointing out that sub doesn’t just perform subtraction - it also updates CPU flags that conditional jump instructions examine to make decisions.
CPU Flags That SUB Modifies
When you execute sub eax, ebx, the CPU sets these flags based on the result:
Flags Modified by SUB:
┌─────────────────────────────────────┐
│ Zero Flag (ZF) - Set if result = 0 │
│ Carry Flag (CF) - Set if borrow occurred │
│ Sign Flag (SF) - Set if result < 0 │
│ Overflow Flag (OF) - Set if signed overflow │
│ Parity Flag (PF) - Set if even 1s │
│ Auxiliary Flag (AF)- Set if carry in low 4 bits │
└─────────────────────────────────────┘
How Jumps Use These Flags
Conditional jumps examine these flags to decide whether to jump:
; Example: Compare two numbers
mov eax, 10
mov ebx, 5
sub eax, ebx ; eax = 5, flags updated based on (10-5=5)
; Now jumps can use the flags:
je equal ; Jump if ZF=1 (if eax was 0)
jne not_equal ; Jump if ZF=0 (if eax was not 0)
jl less ; Jump if SF≠OF (if result was negative)
jg greater ; Jump if ZF=0 AND SF=OF (if result was positive)Visual Example: SUB as Comparison
mov eax, 15
mov ebx, 10
sub eax, ebx ; eax = 5, but flags are set based on comparison
; Flags after SUB:
; ZF = 0 (result not zero)
; SF = 0 (result positive)
; CF = 0 (no borrow)
; OF = 0 (no overflow)
; Now we can jump based on these flags:
je equal ; Won't jump (ZF=0)
jne not_equal ; WILL jump (ZF=0)
jl less ; Won't jump (SF=OF=0)
jg greater ; WILL jump (ZF=0 and SF=OF=0)The Connection: CMP is Actually SUB!
Here’s the big revelation your teacher is hinting at:
; These two are essentially the same:
cmp eax, ebx ; Compare eax with ebx
sub eax, ebx ; Subtract ebx from eax
; The difference:
; CMP: Updates flags, doesn't store result
; SUB: Updates flags AND stores result in eaxPractical Example
mov eax, 20
mov ebx, 15
; Method 1: Using CMP (traditional)
cmp eax, ebx ; Compare without changing eax
jg greater ; Jump if eax > ebx
; eax still contains 20
; Method 2: Using SUB (what your teacher is pointing out)
sub eax, ebx ; eax = 5, flags set based on comparison
jg greater ; Jump if original eax > ebx
; eax now contains 5Why This Matters
Your teacher is teaching you that:
- Arithmetic operations affect program flow - SUB doesn’t just do math, it prepares flags for jumps
- CMP and SUB are related - CMP is SUB without storing the result
- Flags are the bridge between arithmetic and conditional logic
- You can use SUB for comparison if you don’t mind losing the original value
This is why understanding flags is crucial in assembly - they’re the mechanism that connects arithmetic operations to conditional program flow!
The Key Insight: SUB Sets Flags Automatically!
When sub edi,1 executes, it automatically sets CPU flags based on the result:
After sub edi,1:
- If edi was 5 → edi becomes 4 → flags indicate "positive"
- If edi was 1 → edi becomes 0 → flags indicate "zero"
- If edi was 0 → edi becomes -1 → flags indicate "negative"
How JG Uses These Flags
jg (Jump if Greater) examines the flags set by sub:
sub edi,1 ; edi = edi - 1, flags updated
jg _loop ; Jump if result > -1 (i.e., if edi >= 0)Step-by-Step Logic
Let’s trace through what happens:
Initial: edi = 3
Loop 1: sub edi,1 → edi = 2 → flags: positive → jg jumps → continue
Loop 2: sub edi,1 → edi = 1 → flags: positive → jg jumps → continue
Loop 3: sub edi,1 → edi = 0 → flags: zero → jg jumps → continue
Loop 4: sub edi,1 → edi = -1 → flags: negative → jg doesn't jump → exit
- this is a do while loop
 much easy to remember damn
much easy to remember damn
middle → n/2 → 3 (i) → (i) +(i+1) ⇒3+4 (just my thinking)
n(n+1)/2 (n = total number )
mov ecx,edi
add edi,1 ;(n+1)
; mol edi, ecx this wont work these reg
imul edi,ecx
shr edi,1 ;;shift bit right , like /2
mov eax,edi
ret
---
mov ecx, edi ; ecx = n
inc edi ; edi = n + 1
mov eax, ecx ; eax = n
mul edi ; EDX:EAX = eax * edi = n * (n+1)
; Now divide by 2:
; If you know the product fits in 32 bits, and you only care about low 32 bits:
shr eax, 1 ; eax = (n*(n+1)) / 2
can’t use mul in here, use imul
mov eax,edi
inc edi
imul eax,edi
shr eax,1
retlldb debuging is easier in this case
b main, s in, check reg
- interesting diff btw clang and gcc gcc here in terms of assembly of code
- clang win because it turns while loop case into constant case, the formula, damn
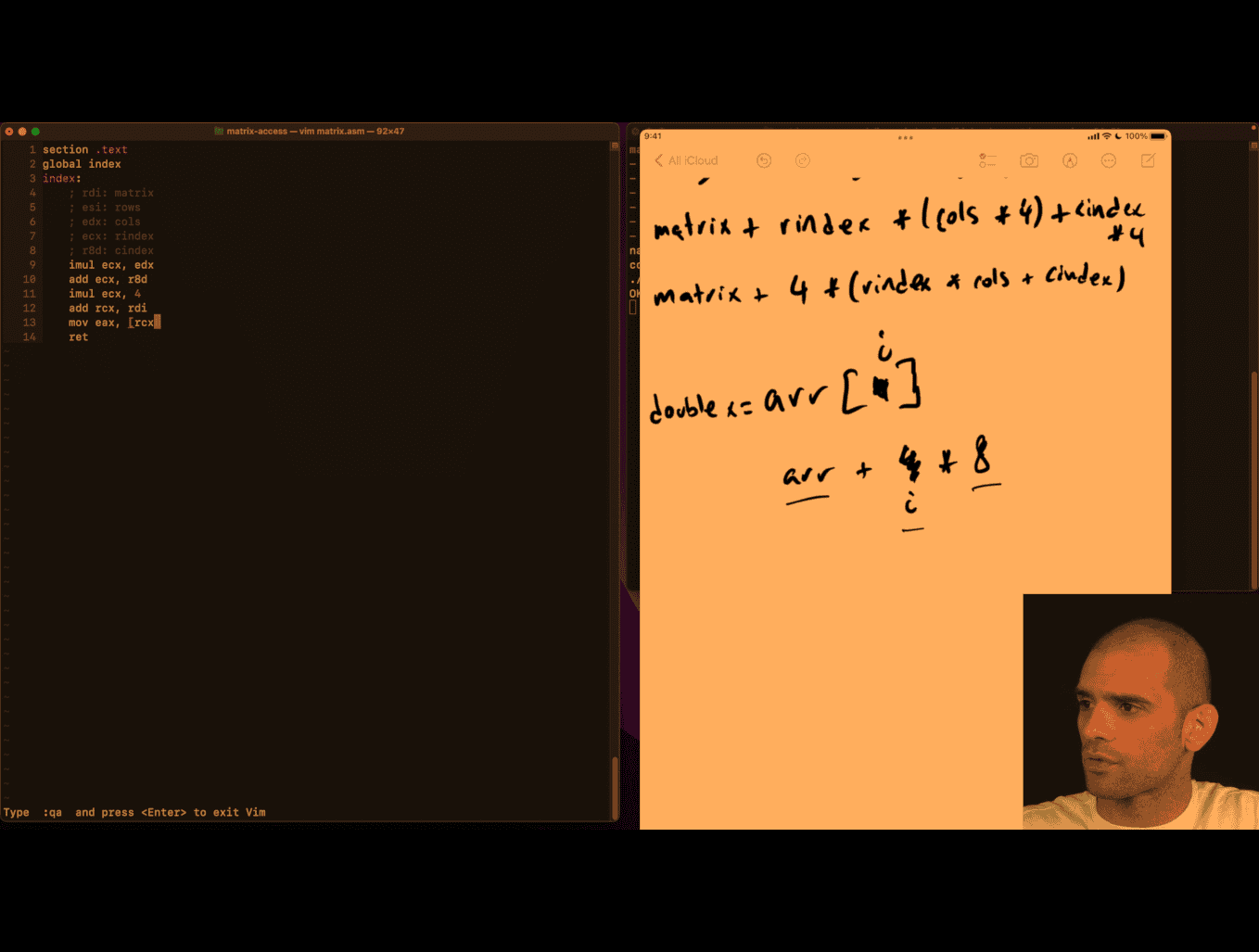
matrix-access
Explain the picture
Your teacher is showing two equivalent ways to compute the memory address of an element in a row‑major int matrix:
-
Top line (byte arithmetic):
- matrix + rindex _ (cols _ 4) + cindex * 4
- Meaning: start at base address
matrix, skiprindexfull rows (each row hascolsints, each int is 4 bytes), then movecindexmore ints (4 bytes each).
-
Bottom line (factored):
- matrix + 4 _ (rindex _ cols + cindex)
- Same thing, just factoring out the 4. The term in parentheses is the element offset; multiplying by 4 converts elements → bytes.
Key points:
- 4 is
sizeof(int)on your platform. More generally: matrix + sizeof(T) _ (rindex _ cols + cindex). - If you do pointer arithmetic on an
int*, you normally write(int*)matrix + (rindex * cols + cindex)because+ 1already advances by 4 bytes forint. - The inner offset
rindex * cols + cindexis the standard row‑major index.
section .text
global index
index:
; extern int index(int *matrix, int rows, int cols, int rindex, int cindex);
; rdi: matrix
; esi: rows
; edx: cols
; ecx: rindex
; r8d: cindex
imul ecx, edx
add ecx,r8d
imul ecx, 4
add rcx, rdi
mov eax,[rcx] ; this deference
ret
section .text
global index
index:
; extern int index(int *matrix, int rows, int cols, int rindex, int cindex);
; rdi: matrix
; esi: rows
; edx: cols
; ecx: rindex
; r8d: cindex
imul ecx, edx
add ecx,r8d
mov eax,[rdi + 4 * rcx]
ret
just deference inside pointer, damn
x8664 pangram
What that line does
- The expression
c & 0x1fkeeps only the low 5 bits ofc(values 0–31). - For ASCII letters this maps both cases to 1–26:
- ‘A’(65) → 65 & 31 = 1 … ‘Z’(90) → 26
- ‘a’(97) → 97 & 31 = 1 … ‘z’(122) → 26
1 << kbuilds a mask with bit k set.bs |= ...sets that bit inbsand keeps previous bits set.
So each letter toggles its corresponding bit 1..26 in bs.
Bit visual
Assume a 32‑bit view (bit 31 on the left … bit 0 on the right). MASK = 0x07fffffe has bits 1..26 set:
0000 0111 1111 1111 1111 1111 1111 1110
^....................^
bit26 ............. bit1
Start with bs = 0.
- Seeing ‘C’ (ASCII 67):
- k = 67 & 31 = 3
- mask = 1 << 3 = 0b…00001000
- bs |= mask sets bit 3:
bs before: 0000 0000 0000 0000 0000 0000 0000 0000
mask : 0000 0000 0000 0000 0000 0000 0000 1000
bs after : 0000 0000 0000 0000 0000 0000 0000 1000
- Seeing ‘x’ (ASCII 120):
- k = 120 & 31 = 24
- mask = 1 << 24 = 0b…0001 0000 0000 0000 0000 0000
- bs after sets bit 24 as well:
bs before: 0000 0000 0000 0000 0000 0000 0000 1000
mask : 0000 0001 0000 0000 0000 0000 0000 0000
bs after : 0000 0001 0000 0000 0000 0000 0000 1000
After processing the whole string, the pangram test
(bs & 0x07fffffe) == 0x07fffffe
checks that all bits 1..26 are set, meaning every letter A–Z/a–z appeared at least once.
Notes:
- The
if (c < '@') continue;quickly skips many non-letters; letters below ’@’ don’t exist, and letters map to 1..26 anyway. - Using
1u << ...is slightly safer (unsigned shift), but with shifts up to 26 a plain1is fine on typical 32‑bit ints.
x64 pangram
#define MASK 0x07fffffe
bool ispangram(char *s) {
uint32_t bs = 0;
char c;
while ((c = *s++) != '\0') {
if (c < '@')
continue; // ignore first 64 chars in ascii table
bs |= 1 << (c & 0x1f);
}
return (bs & MASK) == MASK;
}%define MASK 0x07fffffe
section .text
global pangram
pangram:
; rdi: source string
xor ecx,ecx ; bs = 0
.loop:
movzx edx, byte [rdi] ; c=*s will be edx, read from rdi, zero out extend
cmp edx,0
je .end
add rdi,1 ; s++
cmp edx,'@' ; if c is in first 64 chars of ascii table
jl .loop ; continue
and edx,0x1f
bts ecx, edx ;bitset set ecx to how many bits of edx
jmp .loop
.end:
xor eax,eax
and ecx,MASK ; last return part
cmp ecx,MASK
sete al ; set equal
; todo sometime return 1!
retbinary-converter asm
#include <assert.h>
#include <stdio.h>
extern int binary_convert(char *bits);
int main(void) {
assert(binary_convert("0") == 0);
assert(binary_convert("1") == 1);
assert(binary_convert("110") == 6);
assert(binary_convert("1111") == 15);
assert(binary_convert("10101101") == 173);
printf("OK\n");
}section .text
global binary_convert
binary_convert:
xor eax,eax
.loop:
movzx ecx,byte[rdi]
cmp ecx,0
je .end
shl eax,1
and ecx, 1 ; TODO this assumes that , ecx is surly '0' o '1'
add eax,ecx
add rdi,1
jmp .loop
.end:
ret
x86-64 Assembly Logic: binary_convert
This explains what your teacher is teaching in the provided routine: converting a binary string like “10101101” into an integer using shifts and adds.
High-level algorithm (language-agnostic)
Given a string of bits b0 b1 … bn-1 (each ‘0’ or ‘1’), compute the integer value:
- Start with result = 0
- For each character c in the string:
- result = result << 1 // multiply by 2
- result = result + bit(c) // add 0 or 1
- Return result
This is exactly how we interpret binary: left shift accumulates previous bits, then we add the new least-significant bit.
System V AMD64 calling convention refresher
- First argument (char* s) is in
rdi - Return value is in
rax eaxis the low 32 bits ofrax- Clobbering caller-saved registers like
rax,rcx,rdiis allowed in leaf functions unless the ABI requires otherwise for the caller
The code
section .text
global binary_convert
binary_convert:
xor eax,eax
.loop:
movzx ecx,byte[rdi]
cmp ecx,0
je .end
shl eax,1
and ecx, 1 ; TODO this assumes that , ecx is surly '0' o '1'
add eax,ecx
add rdi,1
jmp .loop
.end:
retLine-by-line explanation
xor eax, eax- Sets
eax = 0(the current accumulated integer).xor reg,regis a common zeroing idiom.
- Sets
.loop:labelmovzx ecx, byte [rdi]- Load the next byte from the string pointer
rdiintoecxand zero-extend it. After this,ecxholds the ASCII code of the current character.
- Load the next byte from the string pointer
cmp ecx, 0thenje .end- Checks for the string terminator
\0. If end of string, jump to return.
- Checks for the string terminator
shl eax, 1- Multiply current result by 2 (shift left by 1). This is how we make room for the next bit.
and ecx, 1- Mask the low bit of the ASCII code. This is a clever fast-path that works because ASCII ‘0’ (0x30 = 48) is even (low bit 0) and ‘1’ (0x31 = 49) is odd (low bit 1). It is unsafe for other characters; it treats any odd ASCII as 1 and any even ASCII as 0.
add eax, ecx- Add that bit (0 or 1) to the result.
add rdi, 1- Advance the pointer to the next character.
jmp .loop- Repeat.
.end: ret- Return with the result in
eax/rax.
- Return with the result in
Worked trace: input “10101101”
We track only eax (result) and the current char.
Initial: eax = 0
- c=‘1’ (0x31 → low bit 1)
- shift: eax = 0 << 1 = 0
- add: eax = 0 + 1 = 1
- c=‘0’ (0x30 → low bit 0)
- shift: 1 << 1 = 2
- add: 2 + 0 = 2
- c=‘1’
- shift: 2 << 1 = 4
- add: 4 + 1 = 5
- c=‘0’
- shift: 5 << 1 = 10
- add: 10 + 0 = 10
- c=‘1’
- shift: 10 << 1 = 20
- add: 20 + 1 = 21
- c=‘1’
- shift: 21 << 1 = 42
- add: 42 + 1 = 43
- c=‘0’
- shift: 43 << 1 = 86
- add: 86 + 0 = 86
- c=‘1’
- shift: 86 << 1 = 172
- add: 172 + 1 = 173
End: ‘\0’ → return 173. Matches your test.
Visual bit growth (LSB on the right)
After each char: value in binary
- start: 00000000
- ‘1’ → 00000001
- ‘0’ → (<<1): 00000010
- ‘1’ → 00000101
- ‘0’ → 00001010
- ‘1’ → 00010101
- ‘1’ → 00101011
- ‘0’ → 01010110
- ‘1’ → 10101101 (173)
What your teacher is emphasizing
- Binary parsing is just repeated: result = result * 2 + next_bit
- Using
shlto multiply by 2 andand 1to extract a bit - Looping over a C string via pointer in
rdiand checking for\0 - Returning via
eaxper ABI
Pitfalls and correctness
- The
and ecx, 1trick accepts any odd byte as bit 1 and any even byte as bit 0. That means characters like ‘3’ (0x33) would be treated as 1, and ‘2’ (0x32) as 0. If the input may contain non-‘0’/‘1’, you should validate.
Safer variant (validate ASCII ‘0’/‘1’)
Conceptually:
- If c == ‘0’ → bit = 0
- Else if c == ‘1’ → bit = 1
- Else stop or error
One assembly approach (keeping branchless where possible):
- Subtract ‘0’ to normalize:
ecx = c - '0'→ ‘0’→0, ‘1’→1, others outside 0..1 - Test range 0..1; if not in range, decide policy (stop or reject)
Sketch:
; ecx currently holds c (zero-extended)
sub ecx, '0' ; '0'->0, '1'->1, others → not 0/1
cmp ecx, 1
ja .invalid ; if ecx > 1, it's invalid char
; here ecx is 0 or 1, safe to use
shl eax, 1
add eax, ecx
; advance pointer and loopPolicy at .invalid could be to stop parsing (like strtol) or return an error code.
Why 32-bit eax is fine
- Your test values fit in 32 bits, and zeroing
eaximplicitly zeros the fullrax. If you want to allow inputs longer than 31 bits, you can perform the shift/add inraxwithshl rax,1andadd rax,rcx(ensurercxis 0/1 and properly zero-extended).
C equivalent for intuition
##include <stdint.h>
int binary_convert(const char *s) {
uint32_t x = 0;
for (unsigned char c; (c = *s++) != '\0'; ) {
x <<= 1;
x += (c & 1); // same assumption as asm: even→0, odd→1
}
return (int)x;
}Takeaways
- Parsing binary is shift-left then add-bit
and 1extracts the low bit fast, but assumes valid input- Understanding the ABI and pointer walking is key to reading small assembly routines
-
Pointer Dereferencing:
- The register
rdiholds the memory address of the current character in the string. byte [rdi]means: “Access the byte at the memory address stored inrdi.”
- The register
-
Zero-Extension:
movzxstands for “move with zero-extension.”- It loads the byte (8 bits) from
byte [rdi]into the lower 8 bits ofecxand sets the upper 24 bits ofecxto 0. This ensures thatecxholds a 32-bit value with the loaded byte in the least significant byte (LSB).
Memory Layout (String in Memory)
Let’s say the string is "10101101\0" (null-terminated). The memory layout might look like this:
Address (rdi) | Value (Byte) | ASCII Code |
|---|---|---|
0x1000 | '1' | 0x31 |
0x1001 | '0' | 0x30 |
0x1002 | '1' | 0x31 |
0x1003 | '0' | 0x30 |
0x1004 | '1' | 0x31 |
0x1005 | '1' | 0x31 |
0x1006 | '0' | 0x30 |
0x1007 | '1' | 0x31 |
0x1008 | '\0' | 0x00 |
Execution Steps
-
First Iteration:
rdi = 0x1000movzx ecx, byte [rdi]→ Load'1'(ASCII0x31) intoecx.ecx = 0x00000031(32-bit value with zero-extension).
-
Second Iteration:
add rdi, 1→rdi = 0x1001movzx ecx, byte [rdi]→ Load'0'(ASCII0x30) intoecx.ecx = 0x00000030.
-
Third Iteration:
add rdi, 1→rdi = 0x1002movzx ecx, byte [rdi]→ Load'1'(ASCII0x31) intoecx.ecx = 0x00000031.
-
Repeat Until Null Terminator:
- The loop continues until
cmp ecx, 0detects the null terminator (0x00) atrdi = 0x1008.
- The loop continues until
cone-volumn
mulss and xmm0 are part of the x86 assembly language, specifically for the SSE (Streaming SIMD Extensions) instruction set.
-
mulss: This instruction performs scalar single-precision floating-point multiplication. It multiplies the lower 32-bit floating-point value in the source operand (register or memory) with the lower 32-bit floating-point value in the destination operand (register) and stores the result in the destination operand. The higher bits of the destination register remain unchanged. -
xmm0: This is one of the 128-bit SSE registers. It is used to store floating-point values or SIMD data. In the context ofmulss, only the lower 32 bits ofxmm0are used for the operation.
In your code:
mulss xmm0, xmm0This multiplies the lower 32-bit floating-point value in xmm0 by itself (i.e., xmm0 = xmm0 * xmm0), effectively squaring the value.
-
SSE Registers (
xmm0–xmm15):- These are 128-bit registers introduced with the SSE (Streaming SIMD Extensions) instruction set.
- They can handle scalar (single value) or SIMD (multiple values) floating-point operations.
- Instructions like
mulss(scalar single-precision) andmulps(packed single-precision) use these registers.
-
x87 FPU Stack Registers (
st(0)–st(7)):- These are part of the older x87 floating-point unit, which uses a stack-based architecture.
- Instructions like
fmuloperate on these registers. - They support extended precision (80-bit floating-point numbers).
Modern Usage
- SSE/AVX registers (
xmm,ymm,zmm) are preferred in modern code because they are faster and support SIMD operations. - The x87 FPU is mostly used for legacy code or when extended precision is required.
In your code, xmm0 is used because it is part of the SSE register set, which is optimized for single-precision floating-point operations.
mulss Example:
movss xmm0, [a] ; Load scalar value from memory into xmm0
movss xmm1, [b] ; Load scalar value from memory into xmm1
mulss xmm0, xmm1 ; xmm0 = xmm0 * xmm1 (only lower 32 bits are multiplied)Here, only the lower 32 bits of xmm0 and xmm1 are multiplied, and the result is stored in the lower 32 bits of xmm0.
mulps Example:
movaps xmm0, [vec1] ; Load packed values (4 floats) from memory into xmm0
movaps xmm1, [vec2] ; Load packed values (4 floats) from memory into xmm1
mulps xmm0, xmm1 ; xmm0 = xmm0 * xmm1 (element-wise multiplication of 4 floats)Here, all four 32-bit floating-point values in xmm0 and xmm1 are multiplied in parallel, and the results are stored in xmm0.
Memory Layout Example:
Assume the memory contains:
vec1: dd 1.0, 2.0, 3.0, 4.0 ; Four floats
vec2: dd 5.0, 6.0, 7.0, 8.0 ; Four floatsAfter mulps xmm0, xmm1, the result in xmm0 will be:
xmm0 = [1.0*5.0, 2.0*6.0, 3.0*7.0, 4.0*8.0]
= [5.0, 12.0, 21.0, 32.0]
Summary
- Use
mulssfor single-value (scalar) floating-point multiplication. - Use
mulpsfor parallel (SIMD) multiplication of multiple floating-point values.
#include <assert.h>
#include <math.h>
#include <stdio.h>
#define float_near(a, b) fabsf((a) - (b)) < 0.01
extern float volume(float radius, float height);
int main(void) {
assert(float_near(0.0f, volume(0.0f, 0.0f)));
assert(float_near(2.09f, volume(1.0f, 2.0f)));
assert(float_near(174.23f, volume(5.5f, 5.5f)));
assert(float_near(9.05f, volume(1.234f, 5.678f)));
printf("OK\n");
}default rel
section .text
global volume
volume:
;V = r *r *h *pi /3
mulss xmm0,xmm0 ; v =r*r
mulss xmm0,xmm1 ; V *= h
mulss xmm0, [pi_on_3] ; V*= pi/3
ret
section .rodata ;constant data ? slight protection
;pi_on_3: dd 3.14 ; floating point 3.14
pi_on_3: dd 1.0471975512 ; floating point 3.14
low level recursion
goal : what is function call in the low level, what is stack for
In assembly language, push and pop are instructions for manipulating the stack:
-
push: Puts a value onto the stack by:- Decrementing the stack pointer (RSP)
- Storing the value at the new stack pointer location
-
pop: Retrieves a value from the stack by:- Loading the value at the current stack pointer location
- Incrementing the stack pointer
In this Fibonacci implementation, the stack is needed for two key reasons:
-
Preserving values during function calls When
fibcalls itself recursively, registers get overwritten. For example:- Line 12:
push rdisavesn-1before the recursive call - Line 17:
push raxsaves the result offib(n-1)before calculatingfib(n-2)
- Line 12:
-
Managing recursive call state Each recursive call needs its own context (parameters and return values)
Without the stack, the intermediate values would be lost when the function makes recursive calls, making it impossible to add fib(n-1) and fib(n-2) together at the end.
section .text
global fib
fib:
;general case:
;return fib(n-1)+fib(n-2)
;
mov eax,edi ; edi -> n , eax -> return ; base case: if n <= 1, return n
cmp edi,1
jle .end
sub edi, 1
push rdi ; push n -1 the top the stack is n-1, as edi will ebe clobbered
call fib ; f(n-1) need to use stack now, some value need to be modified by the callee
pop rdi
; we get result in eax
;
push rax ; push f(n-1) to stack,as eax will be clobbered
sub edi,1
call fib ; f(n-1)
pop rcx; eax has value at the moment, pop previously computed f(n-1) from top of stack and ...
add eax , ecx ; add it into newly computed f(n-2)
.end
ret
- stack alignment requirements
Your teacher is referring to stack alignment requirements in the x64 calling convention (System V ABI on Linux).
The key rule: The stack pointer (RSP) must be 16-byte aligned before each call instruction.
Here’s what’s happening in your code:
-
When your function starts: RSP is misaligned (8 bytes off from 16-byte boundary) because the
call fibinstruction pushed an 8-byte return address -
Your pushes/pops:
push rdi(line 12) - pushes 8 bytespush rax(line 17) - pushes 8 bytes- Total: 16 bytes pushed, so RSP becomes 16-byte aligned again
-
Before recursive calls: The stack is properly aligned when you call
fib
Why alignment matters:
- Modern processors and some instructions (especially SIMD) require 16-byte aligned memory access for optimal performance
- The ABI mandates it - violating alignment can cause crashes or performance penalties
- Some system functions expect proper alignment
In your code: You’re accidentally getting correct alignment because you push exactly 16 bytes total (2 × 8-byte pushes). But this is fragile - if you added another push without a matching one, you’d break alignment.
Proper practice: Explicitly ensure RSP is 16-byte aligned before each call, often by adjusting RSP or using sub rsp, 8 if needed.
Why Use EBP as a Frame Pointer?
- It gives constant offsets for parameters and locals throughout the function.
- Debuggers and backtracers can easily walk frames using saved EBP.
- Modern compilers may omit frame pointers for optimization, but the conceptual model remains.
Mapping to 64-bit System V (Linux/macOS)
Key differences vs 32-bit cdecl:
- First six integer/pointer parameters are in registers:
RDI,RSI,RDX,RCX,R8,R9(remaining go on stack). - Return value is in
RAX. - Callee-saved:
RBX,RBP,R12–R15. - 16-byte stack alignment requirement at each
call. On entry to a function (right after acall),RSP % 16 == 8. Before you execute anothercall, you must adjust the stack soRSP % 16 == 0(e.g.,pushonce orsub rsp, 8). - Leaf functions (no calls) may use the red zone (128 bytes below
RSP) without adjustingRSP.
Minimal 64-bit prologue/epilogue pattern:
; Prologue
push rbp
mov rbp, rsp
sub rsp, N ; allocate locals (choose N to keep alignment before calls)
; ... body ...
; Epilogue
mov rsp, rbp
pop rbp
retWhy Push/Pop and How the Stack Changes
x86-64 push/pop semantics (32-bit similar with 4-byte steps):
push rX→rsp = rsp - 8; [rsp] = rXpop rX→rX = [rsp]; rsp = rsp + 8
LIFO discipline lets you save and restore temporary state (parameters, partial results, saved registers) and also helps meet alignment constraints before calls.
Checklist: Writing Correct Calls
-
Caller side:
- Save caller-saved registers you need later.
- Place arguments (stack or regs depending on ABI).
- Ensure stack alignment before
call(SysV64:rsp % 16 == 0). - Call target and then clean up arguments (cdecl) / not needed (SysV64’s callee cleans “home space” only on Windows x64, not SysV).
-
Callee side:
- Prologue: save
EBP/RBP, set frame, allocate locals, save callee-saved you touch. - Body: do work, keep contract.
- Epilogue: restore callee-saved, deallocate locals, restore frame, place return in
EAX/RAX,ret.
- Prologue: save
Key Takeaways
- The stack is the scratchpad for function calls: return addresses, parameters, locals, saved registers.
- Calling conventions are contracts that let separately compiled code interoperate.
- Visualizing offsets from
EBP/RBPmakes parameter/local access and frame layout clear. - On 64-bit SysV, remember the 16-byte alignment rule before each
call.
What is the fetch decode execute cycle
Faster sum
- google/benchmark: A microbenchmark support library perf as other tool as well
- Linux perf Examples yuninxia/hands-on-simd-programming: 🧩 Hands-on SIMD Programming with C++
look deep what is going on , and how to beat O1 in gcc
concept: use your pc architecture, e.g. skyleak intel, 8 thread if able to use c to tell the compiler that the code are independent, then it can run faster
SIMD (Single Instruction, Multiple Data) code is programming that uses special processor instructions to perform the same operation on multiple data points simultaneously, significantly boosting performance for tasks like image and audio processing. You can write SIMD code directly using compiler intrinsics (e.g., Intel’s SSE/AVX, ARM’s NEON), or rely on libraries (like NumPy or Numba for Python, or high-level libraries like simdjson for JSON parsing) and compilers that automatically “vectorize” your code to leverage these instructions.
/* int sum(int *nums, int n) { */
/* int total = 0; */
/* for (int i = 0; i < n; i++) */
/* total += nums[i]; */
/* return total; */
/* } */
int sum(int *nums, int n) {
int t1 = 0, t2 = 0, t3 = 0, t4 = 0;
for (int i = 0; i < n; i += 4) {
t1 += nums[i];
t2 += nums[i + 1];
t3 += nums[i + 2];
t4 += nums[i + 3];
}
return t1 + t2 + t3 + t4;
}- tested on clang , cc (gcc) -O 2 , with manual t1..t4 , gcc -O2 better than clang
- however, og iterative movement, clang -O2 is the best of the best in the case, damn
I test it with t8 in gcc -O2 , close to clang -O2 non optimize, so clang i guess is also using similar approach
yuninxia/hands-on-simd-programming: 🧩 Hands-on SIMD Programming with C++
- clang compiler is able to found vectorized register, and using simd programming, that is specifically for your cpu bits
e.g
paddd xmm0 xmm2
Vector Registers Explained
%xmm0,%xmm1,%xmm2are 128-bit SIMD registers- Each can hold 4 x 32-bit integers or 2 x 64-bit integers simultaneously
- Operations work on all elements in parallel
Assembly Breakdown
at & t style , not intel
pxor %xmm1,%xmm1 # Clear xmm1 to zero (4 zeros)
movdqu (%rdi,%rsi,1),%xmm2 # Load 4 integers from memory into xmm2
paddd %xmm2,%xmm0 # Parallel add: xmm0 += xmm2 (4 additions at once)
movdqu 0x10(%rdi,%rsi,1),%xmm2 # Load next 4 integers (16 bytes offset)
paddd %xmm2,%xmm1 # Parallel add to second accumulatorHow Clang Optimizes sum += i
For a simple loop like:
int sum = 0;
for (int i = 0; i < n; i++) {
sum += arr[i];
}Clang -O2 applies:
- Loop Unrolling: Process 8 elements per iteration instead of 1
- Vectorization: Use SIMD to add 4 integers simultaneously
- Multiple Accumulators: Two separate sum registers (
xmm0,xmm1) to avoid dependency chains - Memory Prefetching: Load next data while processing current
CPU Microarchitecture Fundamentals
1. Instruction Pipeline
Modern CPUs don’t execute instructions one at a time. Instead, they use a pipeline that processes multiple instructions simultaneously:
Clock Cycle: 1 2 3 4 5 6 7 8
Instruction 1: [F] [D] [E] [M] [W]
Instruction 2: [F] [D] [E] [M] [W]
Instruction 3: [F] [D] [E] [M] [W]
Instruction 4: [F] [D] [E] [M] [W]
F = Fetch, D = Decode, E = Execute, M = Memory, W = Write-back
Key Insight: If instructions are independent, the CPU can start executing the next instruction before the previous one finishes.
2. Out-of-Order Execution
Modern CPUs can reorder instructions to maximize parallelism:
// Original order:
a = x + y; // Instruction 1
b = z + w; // Instruction 2 (independent of instruction 1)
c = a + b; // Instruction 3 (depends on 1 and 2)
// CPU might execute as:
// Cycle 1: Start x+y and z+w simultaneously
// Cycle 2: Finish both additions
// Cycle 3: Start a+bCompiler Limitations
- Conservative Analysis: Compilers must be safe and can’t always prove independence
- Heuristic-Based: Optimization decisions are based on patterns, not perfect analysis
- Generic Optimizations: Compilers optimize for average cases, not your specific data
Human Advantages
- Domain Knowledge: You know your data patterns
- Aggressive Optimization: You can make assumptions compilers can’t
- Targeted Optimization: You can optimize for specific CPU characteristics
Performance Analysis with perf
Basic perf Commands
## Profile your program
perf record ./benchmark_O1
perf report
## Get detailed statistics
perf stat ./benchmark_O1
## Analyze cache performance
perf stat -e cache-misses,cache-references ./benchmark_O1
## Profile specific functions
perf record -g ./benchmark_O1
perf report --stdioKey Metrics to Watch
- Instructions Per Cycle (IPC): Higher is better
- Cache Miss Rate: Lower is better
- Branch Misprediction Rate: Lower is better
- Memory Bandwidth: Higher is better
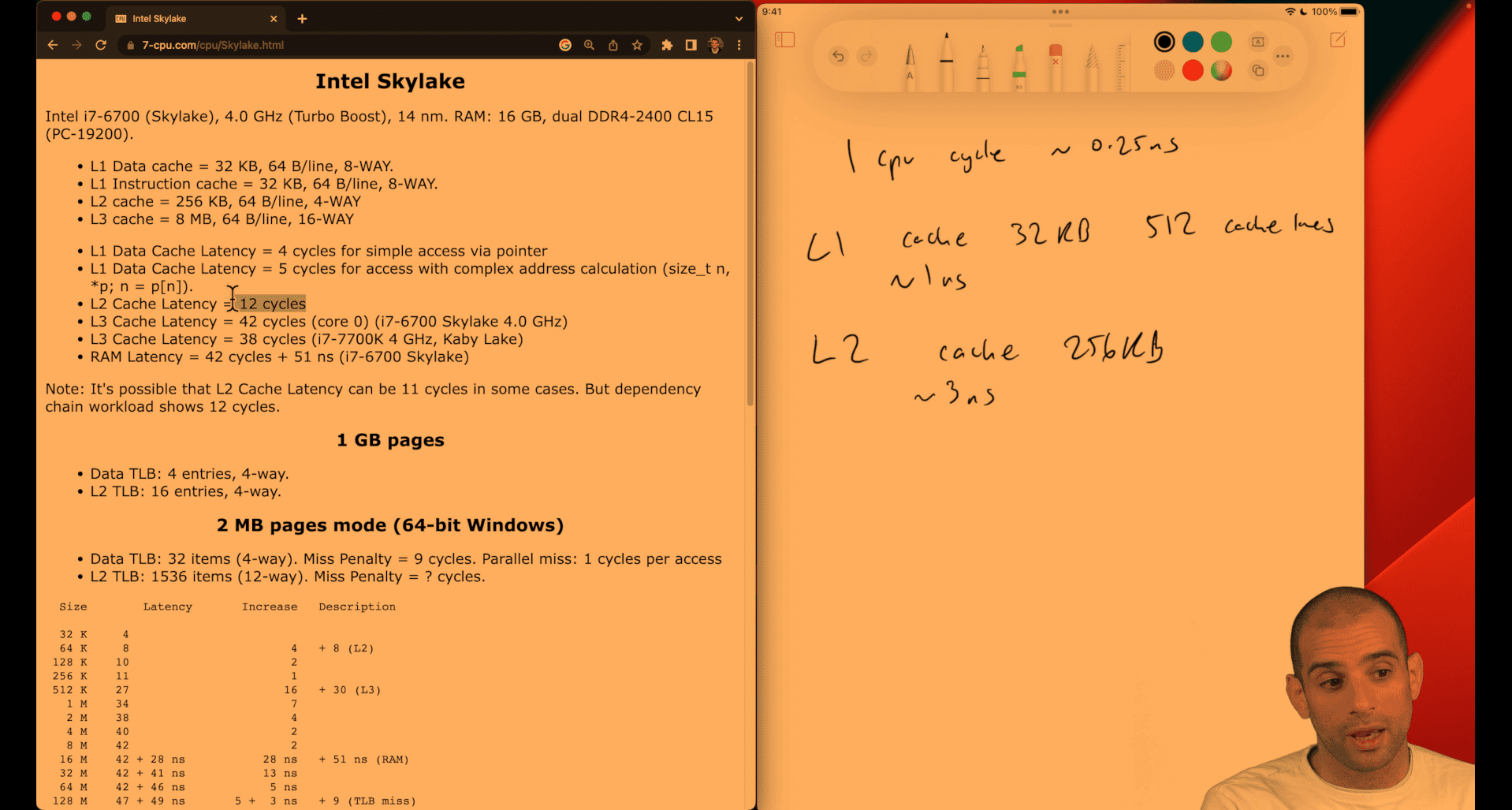
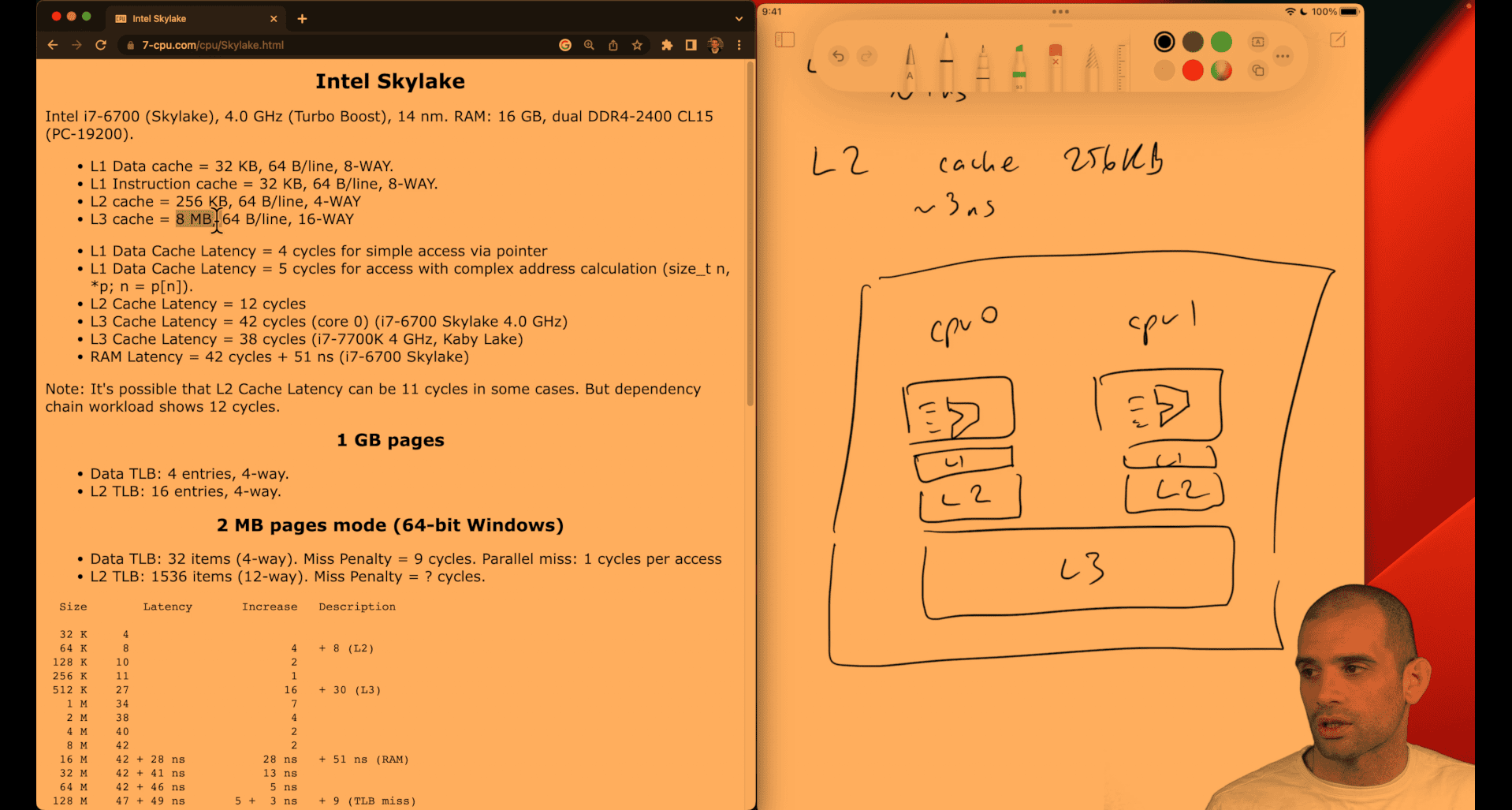
Understanding Your CPU: Intel Skylake
Skylake Characteristics
- 8 threads (4 cores with hyperthreading)
- Out-of-order execution with 8 execution ports
- AVX2 support for 256-bit SIMD operations
- L1 cache: 32KB data + 32KB instruction per core
- L2 cache: 256KB per core
- L3 cache: 8MB shared
Why Your Optimization Works
// Your 4-way unrolling exploits:
t1 += nums[i]; // Port 2/3: Load + Add
t2 += nums[i+1]; // Port 2/3: Load + Add (parallel)
t3 += nums[i+2]; // Port 2/3: Load + Add (parallel)
t4 += nums[i+3]; // Port 2/3: Load + Add (parallel)Skylake can execute 4 independent load+add operations simultaneously!
Advanced Optimization Techniques
1. SIMD (Single Instruction, Multiple Data)
##include <immintrin.h>
int sum_simd(int *nums, int n) {
__m256i sum_vec = _mm256_setzero_si256();
for (int i = 0; i < n; i += 8) {
__m256i data = _mm256_loadu_si256((__m256i*)&nums[i]);
sum_vec = _mm256_add_epi32(sum_vec, data);
}
// Horizontal sum
int result[8];
_mm256_storeu_si256((__m256i*)result, sum_vec);
return result[0] + result[1] + result[2] + result[3] +
result[4] + result[5] + result[6] + result[7];
}2. Cache-Aware Optimization
// Process data in cache-friendly chunks
int sum_cache_aware(int *nums, int n) {
const int CACHE_LINE_SIZE = 64;
const int INTS_PER_LINE = CACHE_LINE_SIZE / sizeof(int);
int total = 0;
for (int i = 0; i < n; i += INTS_PER_LINE) {
int chunk_sum = 0;
for (int j = 0; j < INTS_PER_LINE && i + j < n; j++) {
chunk_sum += nums[i + j];
}
total += chunk_sum;
}
return total;
}3. Compiler Hints
// Tell compiler about data independence
int sum_hinted(int *nums, int n) {
int total = 0;
for (int i = 0; i < n; i++) {
total += nums[i];
__builtin_prefetch(&nums[i + 1], 0, 3); // Prefetch next element
}
return total;
}Key Takeaways
- CPU Parallelism: Modern CPUs can execute multiple independent instructions simultaneously
- Compiler Limitations: Compilers can’t always find the best optimizations
- Manual Optimization: Understanding CPU architecture lets you write faster code
- Measurement: Always benchmark your optimizations with real tools
- Targeted Optimization: Optimize for your specific CPU and data patterns
Next Steps
- Profile Your Code: Use
perfto find bottlenecks - Experiment: Try different unrolling factors and techniques
- Learn SIMD: Use vector instructions for maximum performance
- Cache Optimization: Understand memory hierarchy and access patterns
- Assembly Analysis: Look at generated assembly to understand compiler decisions
Remember: Premature optimization is the root of all evil, but understanding how to optimize when needed is invaluable!
Color quantizing
Got it 👍 Let’s keep it short and clear:
Color Quantizing
- What it is: Reducing the number of distinct colors in an image (e.g., from millions → 256 palette colors).
- Why: Saves memory, makes processing/rendering faster, and is common in GIFs, icons, or embedded systems.
- How: Each pixel’s RGB value is mapped to the “nearest” color in a limited palette (via clustering, uniform quantization, or lookup tables).
Branchless Color Conversion
-
Normal approach: Color conversion (say RGB → grayscale) often uses
ifconditions or clamps like:if (val < 0) val = 0; if (val > 255) val = 255;which cause branches → slower on modern CPUs due to pipeline stalls.
-
Branchless approach: Replace conditionals with arithmetic/bitwise tricks. Example (clamping to [0,255]):
val = (val & ~(val >> 31)); // clamp negatives to 0 val = (val | ((255 - val) >> 31)); // clamp above 255 to 255or using
min/maxintrinsics (_mm_min_epu8,_mm_max_epu8) in SIMD.
👉 Why branchless? Faster and more predictable performance, especially in inner loops of image processing.
#define RED0 0x00
#define RED1 0x20
#define RED2 0x40
#define RED3 0x60
#define RED4 0x80
#define RED5 0xa0
#define RED6 0xc0
#define RED7 0xe0
#define GREEN0 0x00
#define GREEN1 0x04
#define GREEN2 0x08
#define GREEN3 0x0c
#define GREEN4 0x10
#define GREEN5 0x14
#define GREEN6 0x18
#define GREEN7 0x1c
#define BLUE0 0x00
#define BLUE1 0x01
#define BLUE2 0x02
#define BLUE3 0x03
unsigned char quantize(unsigned char red, unsigned char green,
unsigned char blue) {
return (red & 0xe0) | ((green & 0xe0) >> 3) | (blue >> 6);
// 3-3-2 bit rgb
}
unsigned char quantize_prior(unsigned char red, unsigned char green,
unsigned char blue) {
unsigned char out = 0;
if (red < 0x20)
out += RED0;
else if (red < 0x40)
out += RED1;
else if (red < 0x60)
out += RED2;
else if (red < 0x80)
out += RED3;
else if (red < 0xa0)
out += RED4;
else if (red < 0xc0)
out += RED5;
else if (red < 0xe0)
out += RED6;
else
out += RED7;
if (green < 0x20)
out += GREEN0;
else if (green < 0x40)
out += GREEN1;
else if (green < 0x60)
out += GREEN2;
else if (green < 0x80)
out += GREEN3;
else if (green < 0xa0)
out += GREEN4;
else if (green < 0xc0)
out += GREEN5;
else if (green < 0xe0)
out += GREEN6;
else
out += GREEN7;
if (blue < 0x40)
out += BLUE0;
else if (blue < 0x80)
out += BLUE1;
else if (blue < 0xc0)
out += BLUE2;
else
out += BLUE3;
return out;
}1. Red Component (3 bits)
red & 0xe00xe0=11100000in binary- This masks the red value to keep only the top 3 bits
- Result:
0x00,0x20,0x40,0x60,0x80,0xa0,0xc0, or0xe0
2. Green Component (3 bits)
(green & 0xe0) >> 3- First mask green to top 3 bits:
green & 0xe0 - Then shift right by 3 positions:
>> 3 - Result:
0x00,0x04,0x08,0x0c,0x10,0x14,0x18, or0x1c
3. Blue Component (2 bits)
blue >> 6- Shift blue right by 6 positions, keeping only top 2 bits
- Result:
0x00,0x01,0x02, or0x03
4. Combine Components
(red & 0xe0) | ((green & 0xe0) >> 3) | (blue >> 6)- Use bitwise OR to combine all three components
- Each component occupies non-overlapping bit positions
Visual Representation
8-bit Color Encoding (3-3-2)
Bit: 7 6 5 4 3 2 1 0
[R][R][R][G][G][G][B][B]
Red Green Blue
3 3 2
Example: RGB(0xAB, 0xCD, 0xEF)
Red: 0xAB = 10101011
0xAB & 0xe0 = 10100000 = 0xa0
Green: 0xCD = 11001101
0xCD & 0xe0 = 11000000 = 0xc0
0xc0 >> 3 = 00011000 = 0x18
Blue: 0xEF = 11101111
0xEF >> 6 = 00000011 = 0x03
Result: 0xa0 | 0x18 | 0x03 = 0xbb
Performance Analysis
Branching Version (Slow)
unsigned char quantize_prior(unsigned char red, unsigned char green, unsigned char blue) {
unsigned char out = 0;
// Red component - 7 branches!
if (red < 0x20)
out += RED0;
else if (red < 0x40)
out += RED1;
else if (red < 0x60)
out += RED2;
else if (red < 0x80)
out += RED3;
else if (red < 0xa0)
out += RED4;
else if (red < 0xc0)
out += RED5;
else if (red < 0xe0)
out += RED6;
else
out += RED7;
// Green component - 7 more branches!
if (green < 0x20)
out += GREEN0;
else if (green < 0x40)
out += GREEN1;
// ... more branches
// Blue component - 3 more branches!
if (blue < 0x40)
out += BLUE0;
else if (blue < 0x80)
out += BLUE1;
else if (blue < 0xc0)
out += BLUE2;
else
out += BLUE3;
return out;
}Problems:
- 17 conditional branches total
- Unpredictable execution path (depends on input values)
- Branch mispredictions cause pipeline stalls
- Inconsistent performance (some inputs faster than others)
Branchless Version (Fast)
unsigned char quantize(unsigned char red, unsigned char green, unsigned char blue) {
return (red & 0xe0) | ((green & 0xe0) >> 3) | (blue >> 6);
}Advantages:
-
Zero branches - always executes the same instructions
-
Predictable execution time - same performance for all inputs
-
Better CPU pipeline utilization - no stalls
-
Higher instruction-level parallelism - operations can be pipelined
-
777-bits → cmu low level course
General Principles of Branchless Programming
1. Replace Conditionals with Arithmetic
Instead of:
if (x > 0)
return x;
else
return -x;Use:
return (x ^ (x >> 31)) - (x >> 31); // Branchless abs()2. Use Bitwise Operations for Ranges
Instead of:
if (x >= 0 && x < 8)
return x;
else
return 0;Use:
return x & 7; // x % 8, but faster3. Use Lookup Tables for Complex Mappings
Instead of:
if (x == 0) return 0;
else if (x == 1) return 1;
else if (x == 2) return 4;
// ... many more branchesUse:
static const int lookup[] = {0, 1, 4, 9, 16, 25, 36, 49};
return lookup[x & 7];4. Use Conditional Moves When Possible
Instead of:
if (condition)
result = value1;
else
result = value2;Use:
result = condition ? value1 : value2; // Often compiles to conditional moveWhen to Use Branchless Techniques
Good Candidates:
- Hot loops (executed millions of times)
- Image/video processing (pixel-by-pixel operations)
- Cryptographic functions (constant-time requirements)
- Real-time systems (predictable performance needed)
When Branches Are Acceptable:
- Cold code (rarely executed)
- Complex logic (hard to make branchless)
- Readable code (maintainability over performance)
- Compiler optimizations (modern compilers are good at branch prediction)
Advanced Branchless Techniques
1. SIMD Branchless Operations
##include <immintrin.h>
// Process 8 pixels simultaneously
__m256i quantize_simd(__m256i red, __m256i green, __m256i blue) {
__m256i red_quantized = _mm256_and_si256(red, _mm256_set1_epi32(0xe0));
__m256i green_quantized = _mm256_srli_epi32(_mm256_and_si256(green, _mm256_set1_epi32(0xe0)), 3);
__m256i blue_quantized = _mm256_srli_epi32(blue, 6);
return _mm256_or_si256(_mm256_or_si256(red_quantized, green_quantized), blue_quantized);
}2. Bit Manipulation Tricks
// Branchless min/max
int min_branchless(int a, int b) {
return b ^ ((a ^ b) & -(a < b));
}
int max_branchless(int a, int b) {
return a ^ ((a ^ b) & -(a < b));
}
// Branchless sign function
int sign_branchless(int x) {
return (x > 0) - (x < 0);
}Key Takeaways
- Branches are expensive due to branch mispredictions and pipeline stalls
- Bitwise operations can often replace conditional logic
- Predictable execution is crucial for performance-critical code
- Profile before optimizing - not all branches are performance bottlenecks
- Balance readability with performance - sometimes branches are clearer
Next Steps
- Profile your code to identify branch mispredictions
- Experiment with bitwise operations to replace conditionals
- Use SIMD for vectorized branchless operations
- Study assembly output to understand compiler optimizations
- Benchmark different approaches to measure real performance gains
The key insight: Modern CPUs are optimized for predictable, linear execution. Branchless code exploits this by eliminating the unpredictability of conditional jumps.
What is a cache line (brief explanation)
A cache line is the smallest unit of data that a CPU cache transfers between main memory (RAM) and the cache.
- Typically 32 to 128 bytes in size.
- When the CPU needs data, it fetches an entire cache line (not just a single variable) into the cache.
- This works because of spatial locality: if the program accesses one memory location, it’s likely to access nearby locations soon.
👉 In short: a cache line is a fixed-size block of memory that serves as the fundamental unit of caching.
Algorithms for Modern Hardware - Algorithmica
Why are there multiple levels of CPU cache
Intel Skylake Here’s how to count cache lines (and sets) from the specs. Formulas:
Number of lines = cache_size_bytes / line_size_bytes Number of sets = number_of_lines / associativity = cache_size / (line_size × associativity) Line offset bits = log2(line_size); index bits = log2(number_of_sets)
Computed: L1 Data: 32 KB, 64 B/line, 8‑way lines = 32×1024 / 64 = 512 sets = 512 / 8 = 64 bits: offset = 6, index = 6 L1 Instruction: 32 KB, 64 B/line, 8‑way lines = 512 sets = 64 bits: offset = 6, index = 6 L2: 256 KB, 64 B/line, 4‑way lines = 256×1024 / 64 = 4096 sets = 4096 / 4 = 1024 bits: offset = 6, index = 10
like a tradeoff btw shipping, cost, time , quantity
Understanding CPU caches
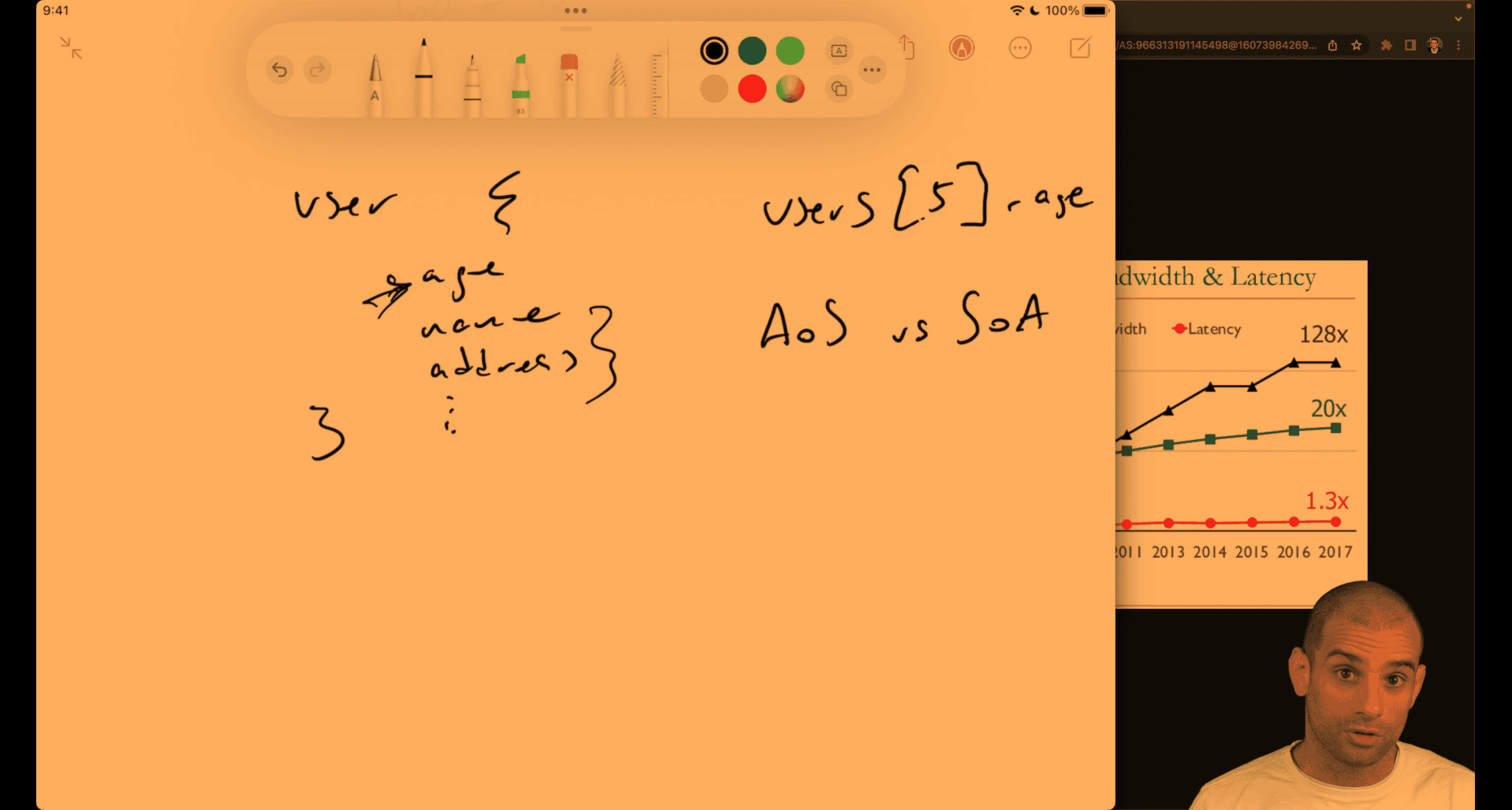
concept:
- array of struct vs struct of array
cpu cache will auto detecting or gussing the next item near the memory
- pointer chasing , like orm(relationship database), object point to another object
cache may have that pointe, or may be not
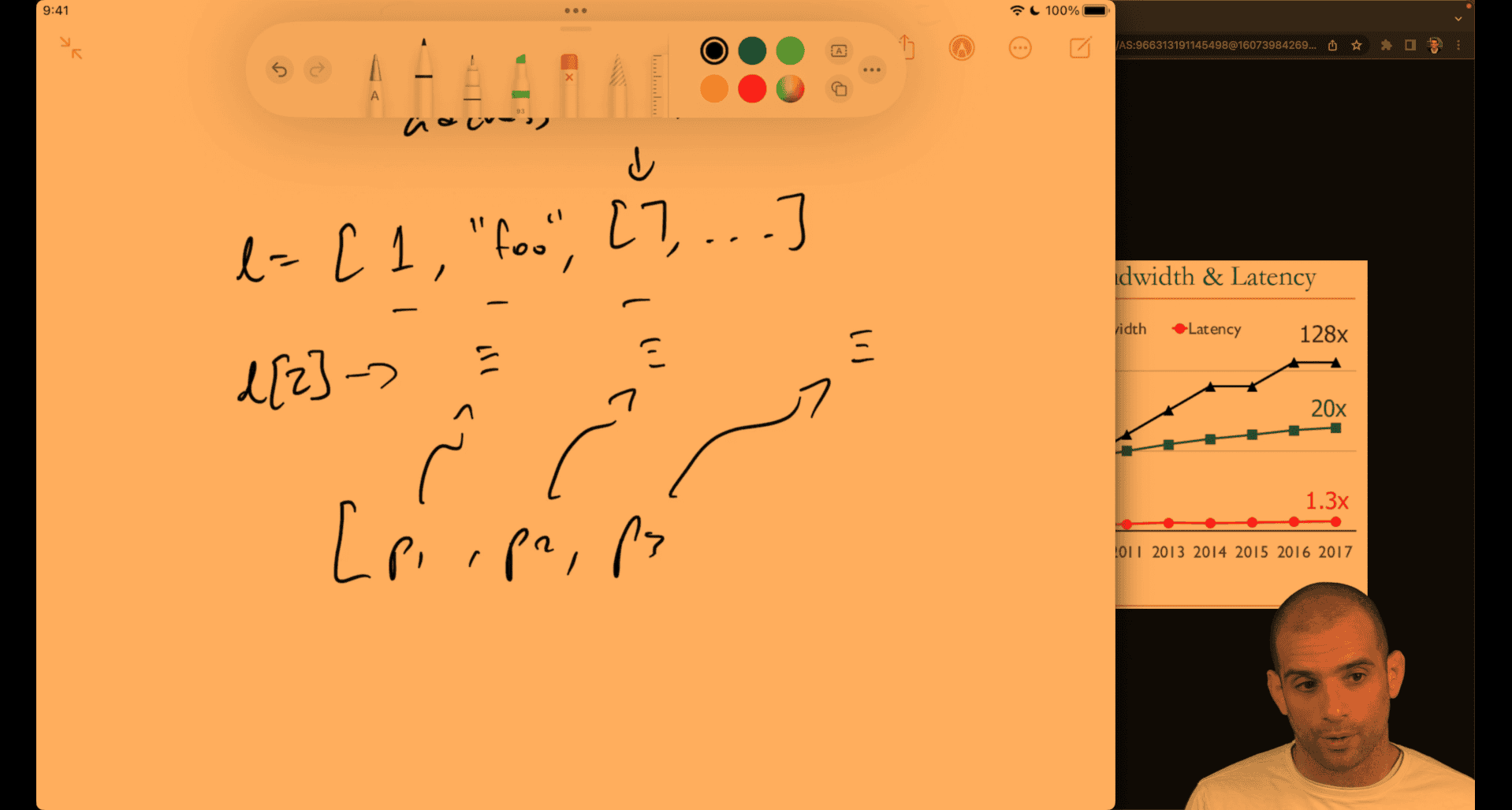
p1 → python object, how it keep the pointer still be O(1) → l[2] → python object pointer to python number
python will also preconstruct small number first
python data structure use pointer as their interface to different type(pointer chasing effect ) so they are relatively slow
numpy → type first → faster
usually when space is larger , time also slower, there is cache utilization in algorithm
e.g. hash map implementation, 2 different to do , two different key to same value ; chaining way ; open addressing
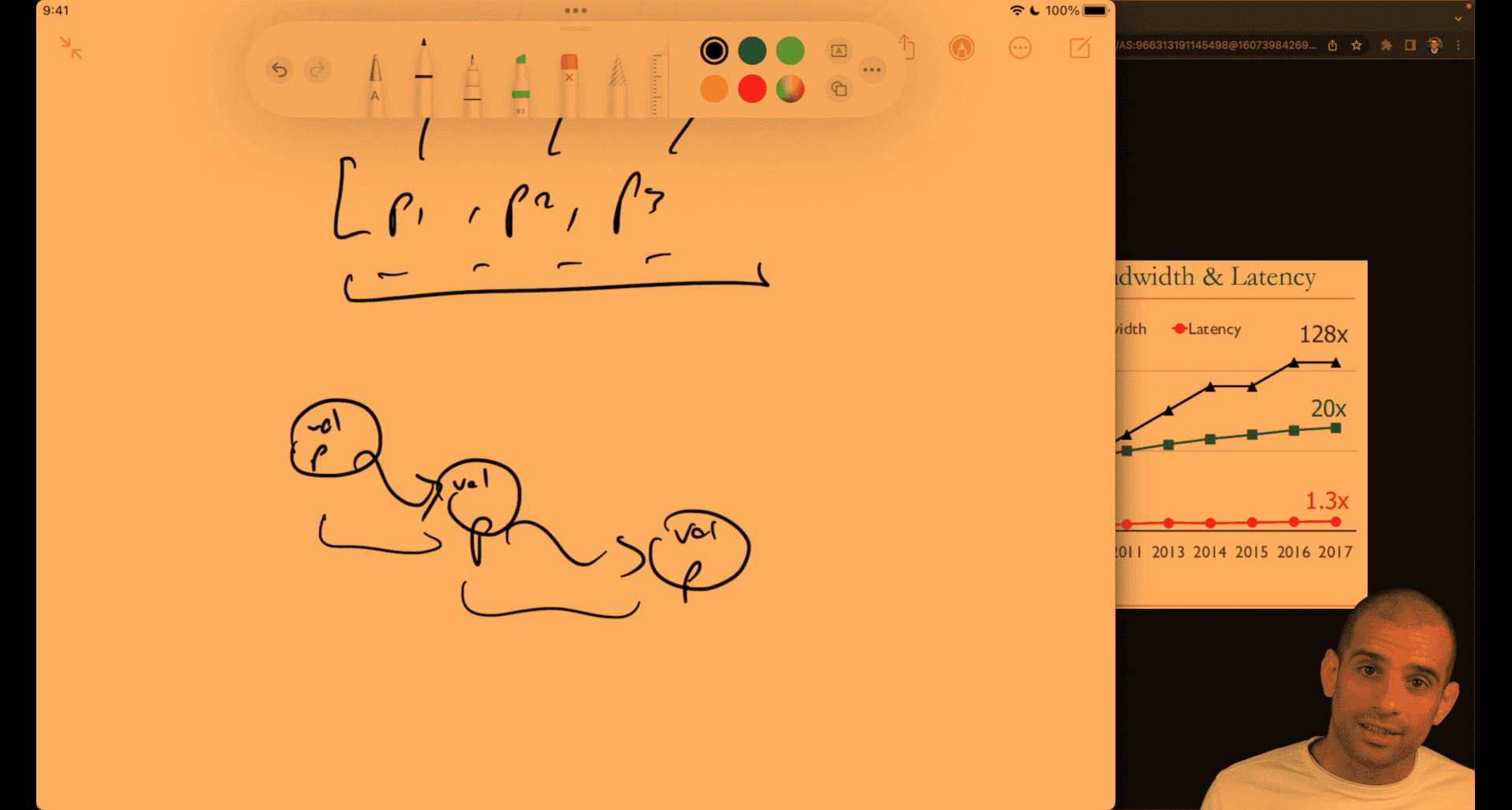 linked list as well, unless you preconfig close memory for each other to make it more efficient
linked list as well, unless you preconfig close memory for each other to make it more efficient
list → lisp
array approach is better
Grayscale speedup
#include <stdio.h>
#include <stdlib.h>
#include <time.h>
#define int32le(b) (b)[0] | ((b)[1] << 8) | ((b)[2] << 16) | ((b)[3] << 24)
// TODO: make a small change to this function to make it much faster
void grayscale(unsigned char *pixels, int32_t width, int32_t height) {
int x, y, offset;
unsigned char lum;
for (x = 0; x < width; x++) {
for (y = 0; y < height; y++) {
offset = 3 * (y * width + x);
lum = 0.0722 * (double)pixels[offset] +
0.7152 * (double)pixels[offset + 1] +
0.2126 * (double)pixels[offset + 2];
pixels[offset] = lum;
pixels[offset + 1] = lum;
pixels[offset + 2] = lum;
}
}
}
int main () {
// open source file and read bytes
FILE *fh = fopen("teapots.bmp", "r");
fseek(fh, 0, SEEK_END);
long size = ftell(fh);
rewind(fh);
unsigned char *buffer = malloc(size);
fread(buffer, size, 1, fh);
fclose(fh);
// process in place
//
int32_t offset = int32le(buffer + 10), width = int32le(buffer + 18),
height = int32le(buffer + 22);
clock_t start = clock();
grayscale(buffer + offset, width, height);
clock_t end = clock();
printf("Elapsed: %0.3fs\n", (double)(end - start) / CLOCKS_PER_SEC);
// write output
fh = fopen("out.bmp", "w");
fwrite(buffer, size, 1, fh);
fclose(fh);
free(buffer);
}Measuring cache performance with perf and cachegrind
Valgrind Home or Perf perf need linux native for more detail, primer said it cann’t work on vm
first , it is a clomn first iteration, not row first iteration → slower
c - Why does the order of the loops affect performance when iterating over a 2D array? - Stack Overflow it seem the speed is depend on programming languages
column first or row first
 fit in cache line → row, kind of like a putting a line of ikea stuff
fit in cache line → row, kind of like a putting a line of ikea stuff
- just exchange x and y line → row based → fit the cache line → faster
pointer-chase
import csv
import datetime
import math
import time
class Address(object):
def __init__(self, address_line, zipcode):
self.address_line = address_line
self.zipcode = zipcode
class DollarAmount(object):
def __init__(self, dollars, cents):
self.dollars = dollars
self.cents = cents
class Payment(object):
def __init__(self, dollar_amount, time):
self.amount = dollar_amount
self.time = time
class User(object):
def __init__(self, user_id, name, age, address, payments):
self.user_id = user_id
self.name = name
self.age = age
self.address = address
self.payments = payments
def average_age(users):
total = 0
for u in users.values():
total += u.age
return total / len(users)
def average_payment_amount(users):
amount = 0
count = 0
for u in users.values():
count += len(u.payments)
for p in u.payments:
amount += float(p.amount.dollars) + float(p.amount.cents) / 100
return amount / count
def stddev_payment_amount(users):
mean = average_payment_amount(users)
squared_diffs = 0
count = 0
for u in users.values():
count += len(u.payments)
for p in u.payments:
amount = float(p.amount.dollars) + float(p.amount.cents) / 100
diff = amount - mean
squared_diffs += diff * diff
return math.sqrt(squared_diffs / count)
def load_data():
users = {}
with open('users.csv') as f:
for line in csv.reader(f):
uid, name, age, address_line, zip_code = line
addr = Address(address_line, zip_code)
users[int(uid)] = User(int(uid), name, int(age), addr, [])
with open('payments.csv') as f:
for line in csv.reader(f):
amount, timestamp, uid = line
payment = Payment(
DollarAmount(dollars=int(amount)//100, cents=int(amount) % 100),
time=datetime.datetime.fromisoformat(timestamp))
users[int(uid)].payments.append(payment)
return users
if __name__ == '__main__':
t = time.perf_counter()
users = load_data()
print(f'Data loading: {time.perf_counter() - t:.3f}s')
t = time.perf_counter()
assert abs(average_age(users) - 59.626) < 0.01
assert abs(stddev_payment_amount(users) - 288684.849) < 0.01
assert abs(average_payment_amount(users) - 499850.559) < 0.01
print(f'Computation {time.perf_counter() - t:.3f}s')optimized version:
import csv
import math
import time
def average_age(ages):
total = 0
for x in ages:
total += x
return total / len(ages)
def average_payment_amount(payments):
total = 0
for dollars, cents in payments:
total += dollars + cents / 100
return total / len(payments)
def stddev_payment_amount(payments):
mean = average_payment_amount(payments)
squared_diffs = 0
for dollars, cents in payments:
amount = dollars + cents / 100
diff = amount - mean
squared_diffs += diff * diff
return math.sqrt(squared_diffs / len(payments))
def load_data():
ages, payments = [], []
with open("users.csv") as f:
for line in csv.reader(f):
uid, name, age, address_line, zip_code = line
ages.append(int(age))
with open("payments.csv") as f:
for line in csv.reader(f):
amount, timestamp, uid = line
payments.append((float(int(amount) // 100), float(amount) % 100))
return ages, payments
if __name__ == "__main__":
t = time.perf_counter()
ages, payments = load_data()
print(f"Data loading: {time.perf_counter() - t:.3f}s")
t = time.perf_counter()
assert abs(average_age(ages) - 59.626) < 0.01
assert abs(stddev_payment_amount(payments) - 288684.849) < 0.01
assert abs(average_payment_amount(payments) - 499850.559) < 0.01
print(f"Computation {time.perf_counter() - t:.3f}s")Version 1: Eliminated DollarAmount Class
class Payment(object):
def __init__(self, dollars, cents, time):
self.dollars = dollars # Direct attribute
self.cents = cents # Direct attribute
self.time = time # PyObject overheadOptimizations:
- Eliminated 1,000,000 DollarAmount objects
- Reduced attribute access:
p.dollarsinstead ofp.amount.dollars - PyObject reduction: ~1M objects eliminated
Memory Access Pattern:
## Fewer indirections
amount = p.dollars + p.cents / 100
## ↑ ↑ ↑
## Payment dollars centsVersion 3: Simplified User and Payment Classes
class Payment(object):
def __init__(self, dollars, cents):
self.dollars = dollars # Direct attribute
self.cents = cents # Direct attribute
class User(object):
def __init__(self, age, payments):
self.age = age # Direct attribute
self.payments = payments # PyObject overheadOptimizations:
- Eliminated 100,000 Address objects
- Removed time from Payment (not used in calculations)
- Removed user_id, name from User (not used in calculations)
- PyObject reduction: ~100K objects eliminated
Key Insight: Only store data that’s actually used in computations!
Version 4: Eliminated ALL Classes
def load_data():
ages, payments = [], [] # Simple lists
# ... load data ...
ages.append(int(age)) # Direct list append
payments.append((float(int(amount) // 100), float(amount) % 100)) # Tuples
return ages, payments
def average_payment_amount(payments):
total = 0
for dollars, cents in payments: # Direct tuple unpacking
total += dollars + cents / 100 # Direct arithmetic
return total / len(payments)Optimizations:
- Eliminated ALL custom classes
- Using built-in types: lists and tuples
- PyObject reduction: ~2.2M objects eliminated
Memory Access Pattern:
## Direct array access
for dollars, cents in payments: # Sequential memory access
total += dollars + cents / 100Performance Impact Analysis
Memory Usage Comparison
| Version | PyObjects | Memory Overhead | Data Structure |
|---|---|---|---|
| Original | ~2.2M | ~70MB | Nested objects |
| Version 1 | ~1.2M | ~38MB | Flattened Payment |
| Version 3 | ~1.1M | ~35MB | Simplified classes |
| Version 4 | ~100K | ~3MB | Lists + tuples |
CPU Performance Factors
1. Attribute Access Overhead
## Original: Dictionary lookup for each attribute
p.amount.dollars # 2 dictionary lookups + pointer dereference
## Version 4: Direct array access
dollars, cents = payment # 1 tuple unpacking operation2. Memory Locality
## Original: Objects scattered in memory
user1 -> payment1 -> amount1 -> dollars1
user2 -> payment2 -> amount2 -> dollars2
## Poor cache locality
## Version 4: Sequential arrays
ages = [age1, age2, age3, ...] # Sequential memory
payments = [(d1,c1), (d2,c2), (d3,c3)] # Sequential memory
## Excellent cache locality3. CPU Instructions
## Original: Many LOAD_ATTR instructions
LOAD_ATTR # Load object attribute
LOAD_ATTR # Load nested attribute
LOAD_ATTR # Load nested attribute
## Version 4: Simple array operations
LOAD_FAST # Load from local variable
BINARY_ADD # Direct arithmeticCache Performance
Cache Line Size: 64 bytes
Original Version:
- Each PyObject: ~32 bytes overhead + data
- Cache line utilization: ~50% (overhead vs data)
- Cache misses: High (scattered objects)
Version 4:
- Tuples: Minimal overhead
- Cache line utilization: ~95% (mostly data)
- Cache misses: Low (sequential access)
Why This Optimization Works
1. Reduced Memory Allocation
- Fewer objects = less memory allocation overhead
- Less garbage collection pressure
- Better memory pool utilization
2. Improved Cache Locality
- Sequential data structures
- Predictable memory access patterns
- CPU prefetcher can work effectively
3. Simplified CPU Instructions
- Fewer attribute lookups
- Direct arithmetic operations
- Reduced function call overhead
4. Better Compiler Optimization
- Simpler code patterns
- More opportunities for optimization
- Better register allocation
Key Lessons
1. Only Store What You Need
## Bad: Store everything
class User(object):
def __init__(self, user_id, name, age, address, payments):
# Store all fields even if unused
## Good: Store only what's computed
ages = [age1, age2, age3, ...] # Only ages needed for average_age()2. Use Built-in Types When Possible
## Bad: Custom classes for simple data
class Payment(object):
def __init__(self, dollars, cents):
self.dollars = dollars
self.cents = cents
## Good: Built-in tuples
payments = [(dollars1, cents1), (dollars2, cents2), ...]3. Minimize Object Hierarchies
## Bad: Deep nesting
user.payment.amount.dollars
## Good: Flat structure
payment[0] # dollars
payment[1] # cents4. Consider Data Layout
## Bad: Scattered objects
users = {id1: user1, id2: user2, ...}
## Good: Sequential arrays
ages = [age1, age2, age3, ...]Performance Expectations
With ~1M payments and ~100K users:
- Original: ~2.2M PyObjects, ~70MB overhead
- Version 4: ~100K PyObjects, ~3MB overhead
Expected speedup: 5-20x depending on:
- CPU cache size
- Memory bandwidth
- Data access patterns
The optimization demonstrates that reducing PyObject overhead can provide massive performance improvements in Python, especially for data-intensive applications.
Conclusion
This progression shows how eliminating unnecessary PyObjects can dramatically improve Python performance by:
- Reducing memory overhead (70MB → 3MB)
- Improving cache locality (scattered → sequential)
- Simplifying CPU instructions (attribute lookups → direct access)
- Enabling better optimization (complex → simple patterns)
The key insight: Use the simplest data structure that meets your needs - often built-in types like lists and tuples are faster than custom classes.
Bogosum
/*
* INSTRUCTIONS
*
* Consider the code below, and ask yourself the following questions:
*
* - How many memory accesses does it take to compute the sum of nums?
* - How many cache hits/misses do you expect to see for ordered vs random
* access?
* - What would change if you:
* - reordered the fields of the struct?
* - removed `foo` and `bar`?
* - changed `value` to a short?
* - Are there certain values of N that would substantially change your
* calculations?
* - Whatever else you find interesting!
*
* Try to form concrete hypotheses, and compare to the results you see in perf
* and/or cachegrind. Note: if the cachegrind simulation takes too long, try
* lower values of n. Also, you may want to compile at -O1 to avoid redundant
* memory access at -O0.
*
* Advanced/strech goal: approximate the expected execution time of both ordered
* and random, and try to explain any differences you see with actual
* measurements!
*
*/
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <time.h>
struct number {
short foo;
int value;
short bar;
};
int sum(struct number nums[], int indexes[], int n) {
int idx, total = 0;
for (int i = 0; i < n; i++) {
idx = indexes[i];
total += nums[idx].value;
}
return total;
}
void shuffle(int *array, size_t n) {
if (n > 1) {
size_t i;
for (i = n - 1; i > 0; i--) {
size_t j = (unsigned int)(drand48() * (i + 1));
int t = array[j];
array[j] = array[i];
array[i] = t;
}
}
}
int main(int argc, char **argv) {
srand(1);
int i, n = (1 << 26);
int *ordered = malloc(n * sizeof(int));
int *random = malloc(n * sizeof(int));
struct number *nums = malloc(n * sizeof(struct number));
// construct arrays of indices
for (i = 0; i < n; i++) {
ordered[i] = i;
random[i] = i;
}
shuffle(random, n);
// pick random numbers to sum
for (i = 0; i < n; i++)
nums[i].value = rand();
if (argc == 2 && strcmp(argv[1], "baseline") == 0)
exit(0);
clock_t start, end;
if (argc == 1 || strcmp(argv[1], "ordered") == 0) {
start = clock();
int sum1 = sum(nums, ordered, n);
end = clock();
printf("Ordered: %d in %0.3fs\n", sum1,
(double)(end - start) / CLOCKS_PER_SEC);
}
if (argc == 1 || strcmp(argv[1], "random") == 0) {
start = clock();
int sum2 = sum(nums, random, n);
end = clock();
printf("Random: %d in %0.3fs\n", sum2,
(double)(end - start) / CLOCKS_PER_SEC);
}
}
Ah, I see what your teacher is correcting! Let me explain the memory alignment and struct padding concepts that I missed in my initial analysis.
Struct Padding and Memory Alignment
Your teacher is pointing out that the struct is actually 12 bytes, not 8 bytes as I calculated. Here’s why:
struct number {
short foo; // 2 bytes
int value; // 4 bytes - MUST be aligned to 4-byte boundary
short bar; // 2 bytes
};Actual memory layout with padding:
Offset 0-1: short foo (2 bytes)
Offset 2-3: [padding] (2 bytes) - unused!
Offset 4-7: int value (4 bytes) - aligned to 4-byte boundary
Offset 8-9: short bar (2 bytes)
Offset 10-11: [padding] (2 bytes) - unused!
Total: 12 bytes per struct (not 8!)
Why This Padding Exists
The compiler adds padding because:
- Performance: CPUs can access aligned data much faster than misaligned data
- Hardware requirements: Some CPUs require certain data types to be aligned
- Cache efficiency: Aligned data loads more efficiently into cache lines
Updated Cache Analysis
Cache line behavior (64-byte cache lines):
- Each struct: 12 bytes
- Structs per cache line: 64 ÷ 12 = 5 complete structs per cache line
- Remaining space: 4 bytes unused
Cache performance:
- Ordered access: 1 miss per 5 accesses = 20% miss rate
- Random access: ~100% miss rate
- Expected speedup: Random access should be about 5x slower than ordered access
Cache Capacity Analysis
With your teacher’s L3 cache = 7MB:
- L1 cache (~32KB): Can hold ~2,730 structs (0.004% of dataset)
- L2 cache (~1MB): Can hold ~87,000 structs (0.13% of dataset)
- L3 cache (7MB): Can hold ~583,000 structs (0.87% of dataset)
Total dataset size: 67M structs × 12 bytes = 805MB
The “Struct Header” Concept
When your teacher mentions “struct header,” they’re referring to the implicit overhead that structs have due to alignment requirements. It’s not a literal header, but rather the padding that gets added to make the struct properly aligned.
Key Lessons
- Memory alignment significantly impacts both space usage and performance
- Struct padding can waste memory and reduce cache efficiency
- Even large caches can only hold tiny fractions of big datasets
- Small details like padding can have big performance impacts
This is exactly why understanding memory hierarchy is crucial - these low-level details matter a lot for performance!
change struct order , int first → bigger 2. delete those char to test the struct
- delete the struct
int sum(short nums[], int indexes[], int n) {
int idx, total = 0;
for (int i = 0; i < n; i++) {
idx = indexes[i];
total += nums[idx];
}
return total;
}